Documentación
Activos del mundo de la simulación
Creamos entornos adicionales que puede usar con sus robots. Se pueden usar para probar aplicaciones de reconocimiento facial, navegación, omisión de obstáculos, aprendizaje automático. Además, es posible adaptarlos a sus casos de uso particulares.
Mundos de viviendas de WorldForge

AWS RoboMaker WorldForge admite la generación automática de una multitud de entornos de interiores de viviendas, completos con planos configurables por piso y muebles.
Mundo de vivienda pequeña
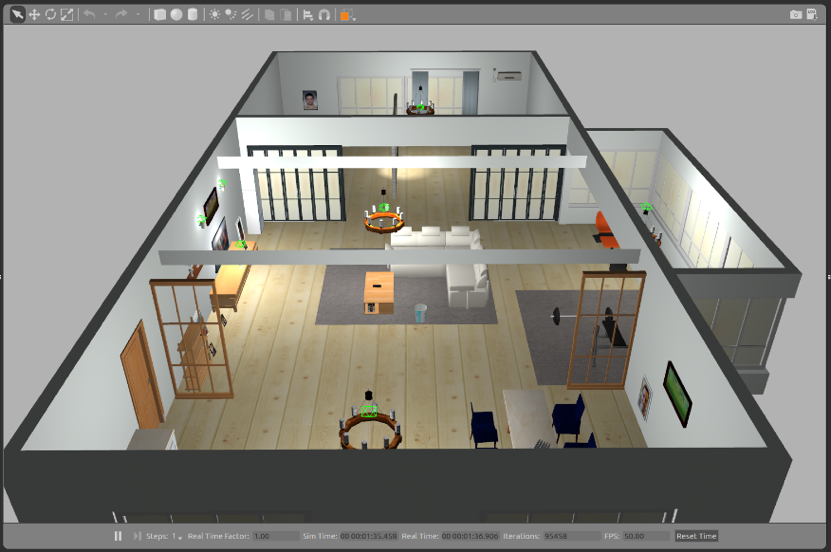
Además, este mundo de vivienda simple está disponible para que usted lo use. Proporciona una pequeña vivienda con cocina, sala de estar, gimnasio y fotos que puede personalizar para probar aplicaciones de reconocimiento de imágenes. Hay muchos obstáculos que su robot debe detectar.
Mundo de hospital
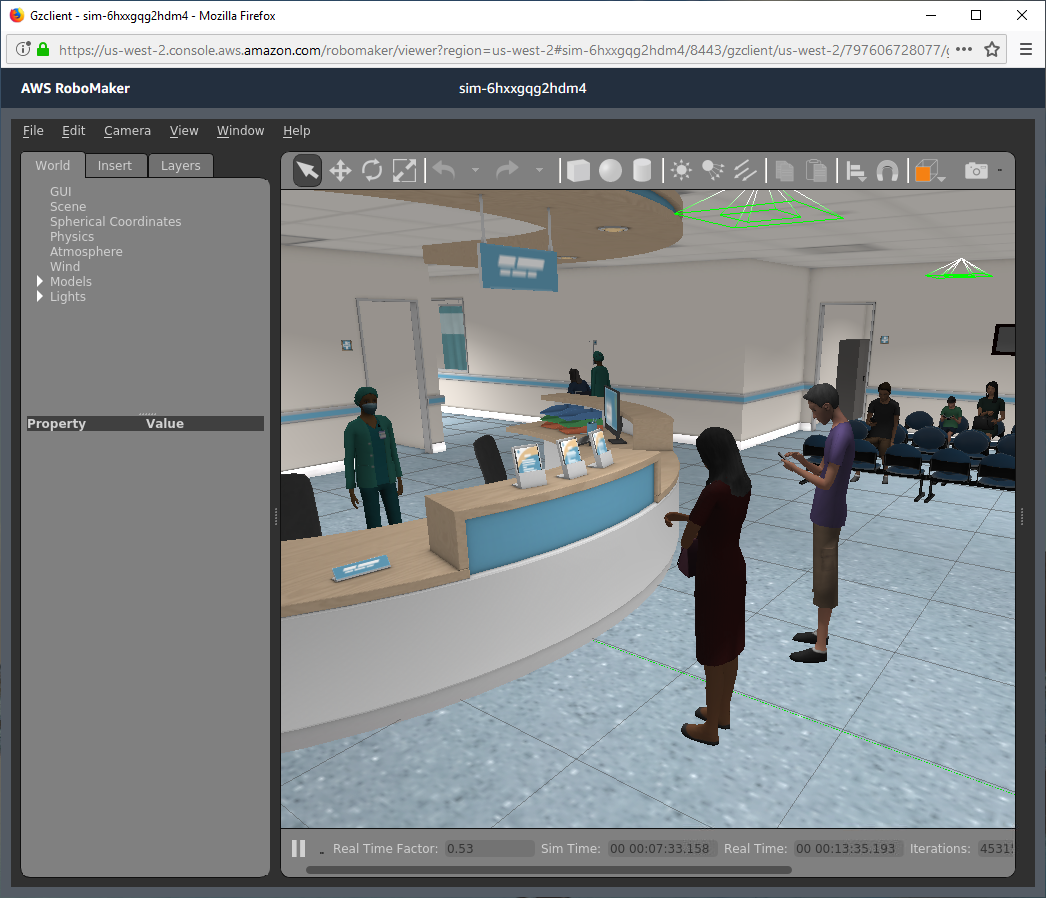
Un gran mundo de hospital con una recepción y sala de espera, consultorios, sala de pacientes, depósito y una sala de descanso para el personal.
Mundo de depósito pequeño
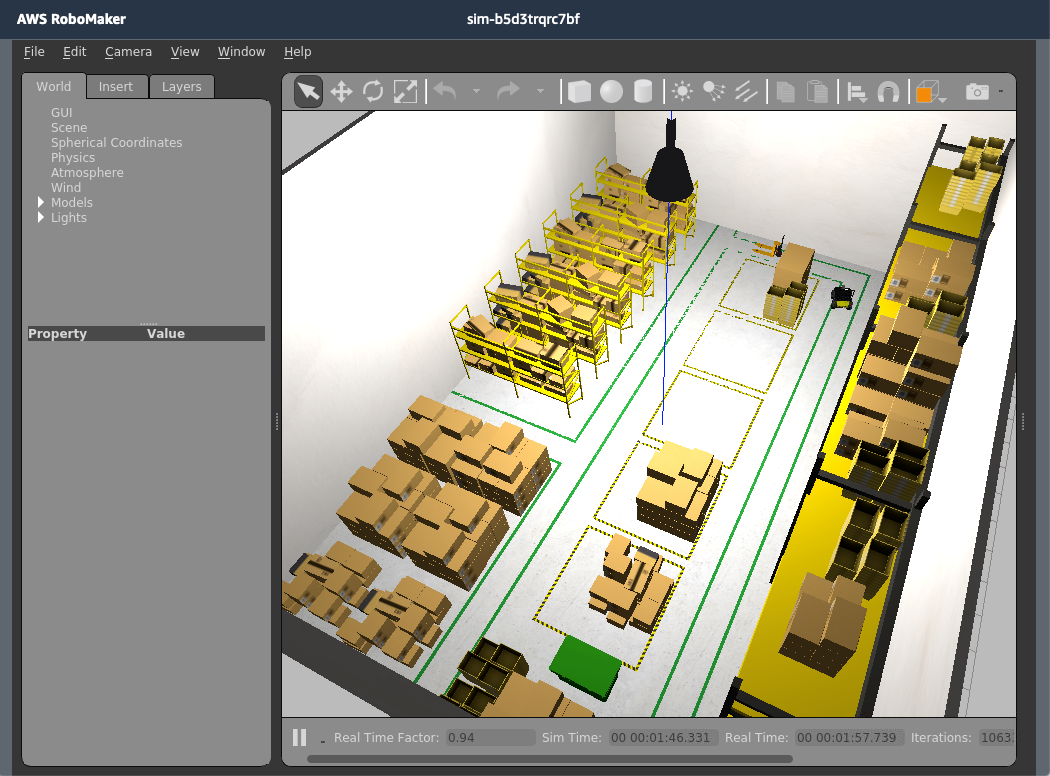
Un mundo de depósito pequeño para probar sus aplicaciones robóticas para casos de uso de depósito y logística.
Librería
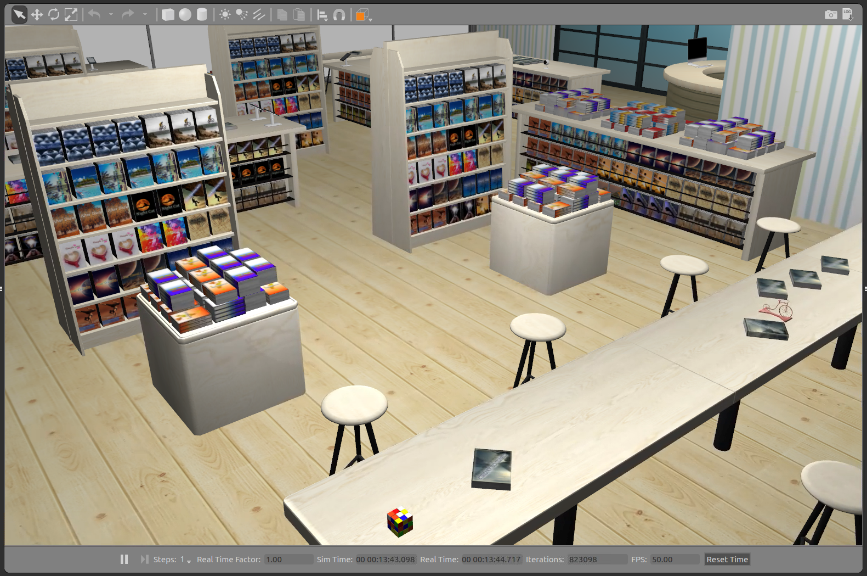
Recorra estanterías de libros en esta librería simulada. Incluye diferentes obstáculos, como sillas y mesas, que su robot debe detectar.
Aplicaciones de muestra
Con AWS RoboMaker se incluyen aplicaciones de robótica de muestra para ayudarlo a comenzar rápidamente. Estas son el punto de partida para las capacidades de comando de voz, reconocimiento, monitorización y administración de flota que se suelen requerir en las aplicaciones de robótica inteligente. El código de aplicación de robótica está disponible con las aplicaciones de muestra (instrucciones para la funcionalidad de su robot), junto con el código de aplicación de simulación (definición del entorno donde se ejecutarán las simulaciones). Haga clic aquí para empezar a trabajar con las muestras.
Inicio en RoboMaker
Hola, mundo
Aprenda los conceptos básicos de cómo estructurar sus aplicaciones de simulación y robótica, editar código, crear, lanzar nuevas simulaciones e implementar aplicaciones en robots. Empiece con una plantilla de proyecto básica que incluye un robot en un entorno de simulación vacío.
Navegación
Navegue con un robot a través de ubicaciones designadas en un mundo que simula una librería. Descubra cómo generar de manera procedimental un mapa de ocupación para cualquier mundo de Gazebo a través de un complemento de generación de mapas.
Lanzar en GitHub
Iniciador de simulación
Inicie simulaciones por lotes en AWS RoboMaker con Code Pipeline y Step Functions. Obtenga más información en el repositorio de código.
Navegación del robot
Cree un mapa y desplace el robot hasta un lugar designado en el simulador RoboMaker. Obtenga más información en el repositorio de código.
Aprendizaje mediante refuerzo
Escape desde un mundo de laberinto entrenando un modelo de aprendizaje de refuerzo en AWS RoboMaker. Obtenga más información en el repositorio de código.
Aplicación robótica integral
Esta aplicación de muestra demuestra un sistema robótico integral con el Rover de código abierto de NASA JPL. Incluye un archivo URDF diseñado como el popular proyecto de código abierto. Obtenga más información en el repositorio de código.
Simulación de flota de varios robots
Conozca cómo poner en marcha una flota de robots en simulación en Gazebo, para permitir el desarrollo y las pruebas de aplicaciones tales como los planificadores de rutas y las herramientas de gestión de flotas.
Obtenga más información en el repositorio de código.
Supervisión del robot
Supervise las métricas operativas y de estado de un robot en una librería simulada mediante el uso de Amazon CloudWatch Metrics y Amazon CloudWatch Logs. Obtenga más información en el repositorio de código.
Extensiones ROS
Las extensiones en la nube de RoboMaker para ROS incluyen servicios como streaming de videos, con Amazon Kinesis Video Streams; análisis de imagen y video, con Amazon Rekognition; reconocimiento del habla, con Amazon Lex; generación del habla, con Amazon Polly; y registro y supervisión, con Amazon CloudWatch. RoboMaker proporciona cada uno de estos servicios en la nube como paquetes ROS de código abierto, de manera que pueda aprovechar las API de la nube para ampliar funciones en el robot, todo en un marco de un software conocido.
Obtenga más información acerca de cada una de estas extensiones de servicios en la nube en el repositorio de código.
Extensiones en la nube para ROS1
Kits para desarrolladores de hardware
La creación de robots y el agregado de funcionalidades avanzadas requiere muchas opciones por parte de los desarrolladores. Para eliminar la incertidumbre y acelerar el desarrollo, los socios de AWS han creado una serie de kits de desarrollo robótico que incluyen soluciones completas de hardware, software preinstalado y mucha documentación y tutoriales.

Intel: kit para desarrolladores UP Squared RoboMaker
El kit para desarrolladores UP Squared RoboMaker es la forma más fácil de comenzar con su proyecto de robótica con tecnología AWS RoboMaker. Es un paquete de inicio diseñado para sque los desarrolladores agreguen inteligencia artificial (IA) y visión artificial de manera rápida y fácil a sus robots. Este kit ofrece un tutorial claro sobre cómo desarrollar hardware desde el nivel del módulo y cómo usar los servicios en la nube para acortar el tiempo de desarrollo. Los desarrolladores han podido agregar visión artificial a sus robots en un solo día y demostraciones de robótica en pocos días. Con la experiencia de Intel, AWS y AAEON, este kit tiene como objetivo ofrecer a los desarrolladores un guía desde la implementación del prototipo hasta el campo.
Este kit cuenta una placa UP Squared con un procesador Intel® Atom™ x7-E3950, cámara Intel® RealSense™ D435i, una X VPU Intel® Movidius™ Myriad™, es totalmente compatible con los servicios en la nube de AWS RoboMaker y extiende el marco de software de la robótica de código abierto, Robot Operating System (ROS).
Obtenga más información sobre el kit UP squared Robomaker y haga su pedido hoy
Más información sobre los socios de Intel y Aaeon
.71e2a406fb99c58b15cc16feb27f4c11c20f5d62.png "NVIDIA_600x400.png")
Nvidia: kit de AI JetBot con ROS y AWS RoboMaker
Nvidia acelera el desarrollo de robots desde la nube hasta el borde con AWS RoboMaker. La simulación y el desarrollo de robots ahora se pueden realizar fácilmente en la nube y es posible implementarlos en millones de robots y otras máquinas autónomas con tecnología Jetson. Esto incluye la plataforma de referencia de código abierto NVIDIA, JetBot, con tecnología de Jetson Nano. Jetbot es fácil de configurar y usar, es compatible con muchos accesorios e incluye tutoriales interactivos que le muestran cómo aprovechar el poder de la AI para seguir objetos, evitar colisiones y más. El kit de AI de JetBot con tecnología de Nvidia y con ROS y AWS RoboMaker incluye la placa, un completo chasis de robot, ruedas y controladores junto con una batería y una cámara de 8 MP. Con el kit se entrega mucha documentación.
Conozca el kit Jetbot y haga su pedido ahora
Más información sobre la sociedad con Nivida.
Qualcomm: plataforma Robotics RB3 con compatibilidad integrada con AWS RoboMaker
La compatibilidad de Qualcomm Technologies con AWS RoboMaker de Amazon Web Services está ayudando a transformar la innovación en robótica. La plataforma Qualcomm Robotics RB3 cuenta con informática heterogénea de alto rendimiento, el aprendizaje automático integrado en el dispositivo y la visión artificial, procesamiento con sensores de alta fidelidad para percepción, odometría para localización, mapeo y navegación, y conectividad 4G LTE y Wi-Fi. También ofrece a los desarrolladores herramientas para crear robots que puedan acelerar la innovación, revolucionar la logística y mejorar nuestra vida diaria. El soporte integrado del kit de desarrollo Qualcomm Robotics RB3 para AWS Robomaker ayuda a desarrollar, probar e implementar aplicaciones de robótica inteligente a escala y ofrece una solución del borde a la nube para hacer que el desarrollo de aplicaciones de robótica inteligente sea más accesible.
Obtenga más información sobre el kit de Qualcomm Robotics RB3 y compre ahora
Más información sobre el compromiso de Qualcomm con la innovación en robótica
La documentación y una extensa documentación paso a paso para desarrolladores están disponibles aquí: https://developer.qualcomm.com/project/aws-robomaker-rb3



Obtenga más información sobre AWS RoboMaker en la página de preguntas frecuentes.
Obtenga acceso instantáneo a la capa gratuita de AWS.