亚马逊AWS官方博客
Accelerating ROS 2 Simulation and Data Collection on AWS with NVIDIA Isaac Sim – Use Case: Lerobot SO-101
The Chinese version of this blog post is published at the same time.
Background
In modern robotics development, traditional workflows heavily rely on physical hardware for data collection and algorithm validation. While effective, this approach incurs high capital and operational costs, introduces risks of hardware wear or damage, and is constrained by environmental and logistical factors. With the rapid development of cloud computing, cloud-native robotic simulation platforms have emerged as a transformative alternative, which enable safe, repeatable, and scalable experimentation without the limitations of physical test environments.
This article details how to leverage AWS’s powerful computing capabilities, combined with the NVIDIA Isaac Sim simulation environment, to achieve remote teleoperation and data collection of the Lerobot SO-101 robotic arm. This cloud-based simulation solution significantly reduces hardware costs, offers scalable compute resources, and supports large-scale parallel simulation experiments — providing an ideal environment for fast iteration and verification of robotics algorithms.
Architecture Design
Workflow Diagram
 |
Architecture Overview
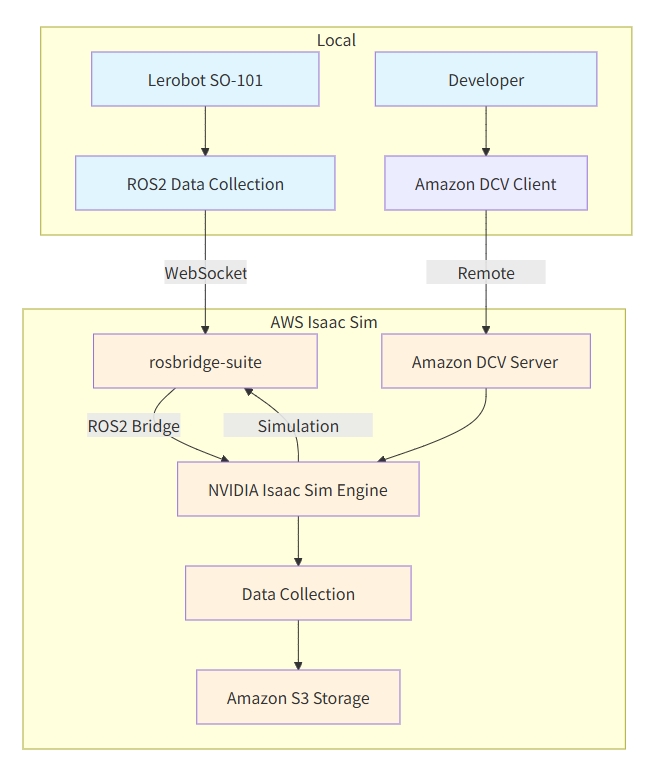
The architecture builds a cloud-based Isaac Sim environment on AWS EC2, integrating local robotic devices with cloud simulation for seamless remote development and data collection.
Core Components
Local Environment
- Lerobot SO-101 as the physical robot platform
- ROS2 data collection node for sensor data acquisition
- Developer workstation for coding and debugging interface
- Amazon DCV client for visualized remote access
AWS Cloud Environment
- EC2 instances running NVIDIA Isaac Sim
- Amazon DCV Server for high-performance remote desktop access
- rosbridge-suite for ROS2 communication with local devices
- Amazon S3 for simulation data, models, and artifacts storage
Data Flow
Real-time Data Synchronization
- The local SO-101 device collects sensor data via ROS2 node
- Data is transmitted via WebSocket to the cloud rosbridge service
- rosbridge bridges the incoming data streams to the Isaac Sim
- Simulation results are processed and fed back to the local device in real time
Remote Development Access
- Developers connect to the EC2 workstation via the DCV client
- Full graphical access to Isaac Sim is provided
- Simulation can be debugged and configured interactively in real time
Data Persistence
- Training data and model parameters generated during simulation are automatically captured
- A dedicated data collection module ensures centralized management and consistency
- All artifacts are stored in Amazon S3, enabling backup, version control, and downstream ML workflows
Implementation Steps
Phase 1: Deploy Issac Sim on AWS
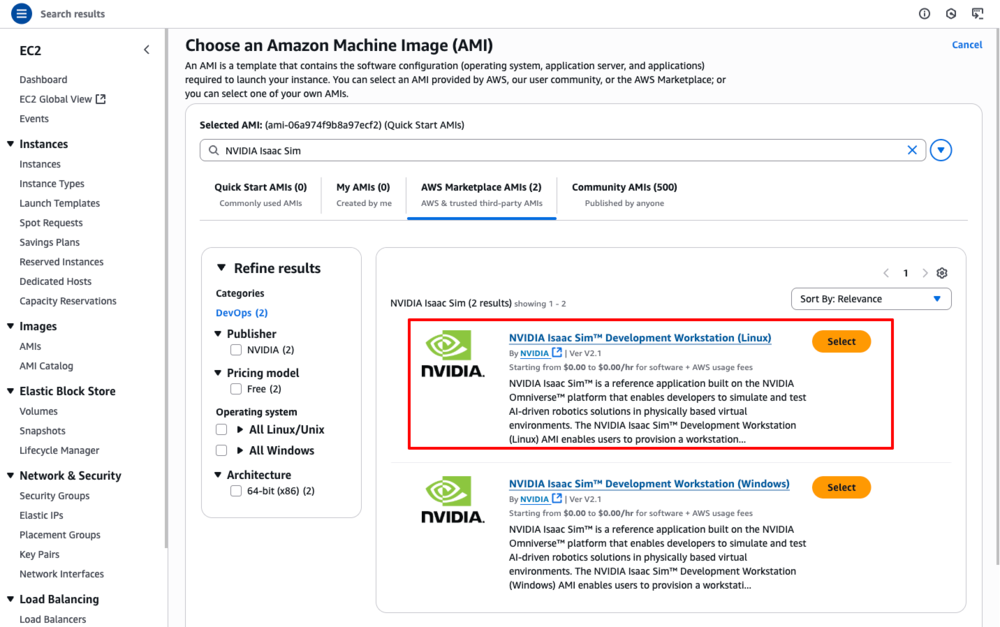
1.1 Launch NVIDIA Isaac Sim™ Development Workstation
Marketplace link: NVIDIA Isaac Sim™ Development Workstation
Navigate to: AWS Console → EC2 → Launch Instance → AWS Marketplace AMIs → search “NVIDIA Isaac Sim”.
Choose NVIDIxA Isaac Sim™ Development Workstation (Linux), then configure security groups and launch the instance.
 |
Recommended configuration:
- Instance type:
g6e.8xlarge(GPU-accelerated) - Storage:
500GB EBS gp3 - Open ports:
22(SSH),8443(DCV Remote Desktop),9090(WebSocket communication)
Phase 2: Configure ROS2 Data Collection and rosbridge Service
2.1 Setup Local Development Environment
2.2 Deploy Rosbridge service on AWS
2.3 Setup local robot device connection
On your local developer workstation, connect the Lerobot SO-101 robotic arm and execute the following commands:
2.4 Establish the ROS2 Communication Bridge
Run the following commands on your local machine to automatically forward USB data from the Lerobot device to ROS2 topics on the remote EC2 instance:
Then, log in to your AWS EC2 instance to verify the ROS2 topics.
Phase 3: Setup Amazon DCV Visualization Channel
3.1 Connect to Amazon DCV Remote Desktop
- On your local computer, install the Amazon DCV client from https://www.amazondcv.com/.
- Use the client to connect to the EC2 instance. Configure the connection with the following parameters:
- Server:
<your_ec2_public_ip>:8443 - Username:
ubuntu - Password: the Ubuntu password you configured in Step 2
- Server:
3.2 Initialize the Isaac Sim Environment
Access the remote EC2 instance via the DCV client and run:
Follow the steps below inside the Isaac Sim interface:
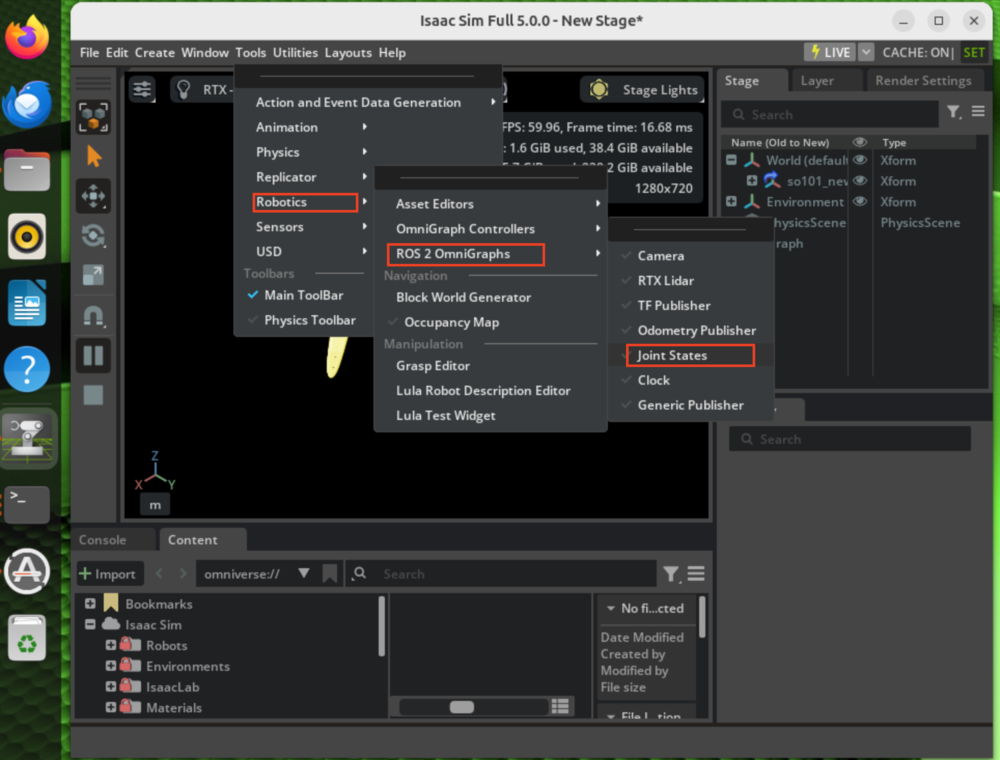
- URDF Model Import: File → Import → Select
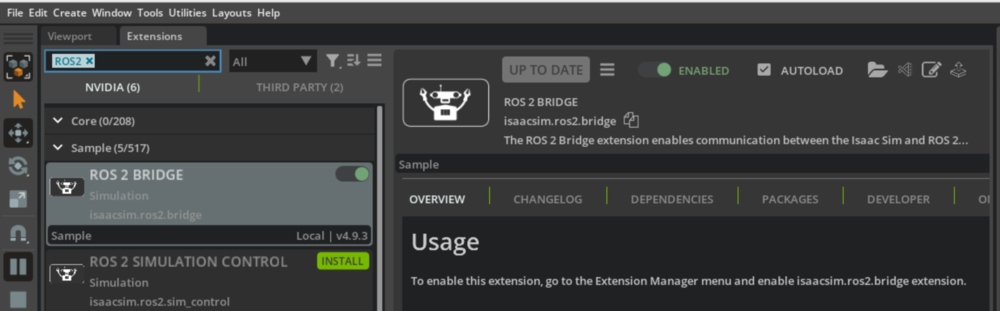
~/Documents/SO-ARM100/Simulation/SO101/so101_new_calib.urdf - ROS2 Bridge Extension Activation: Window → Extensions → Search “ROS 2 Bridge” → Enable “isaacsim.ros2.bridge”
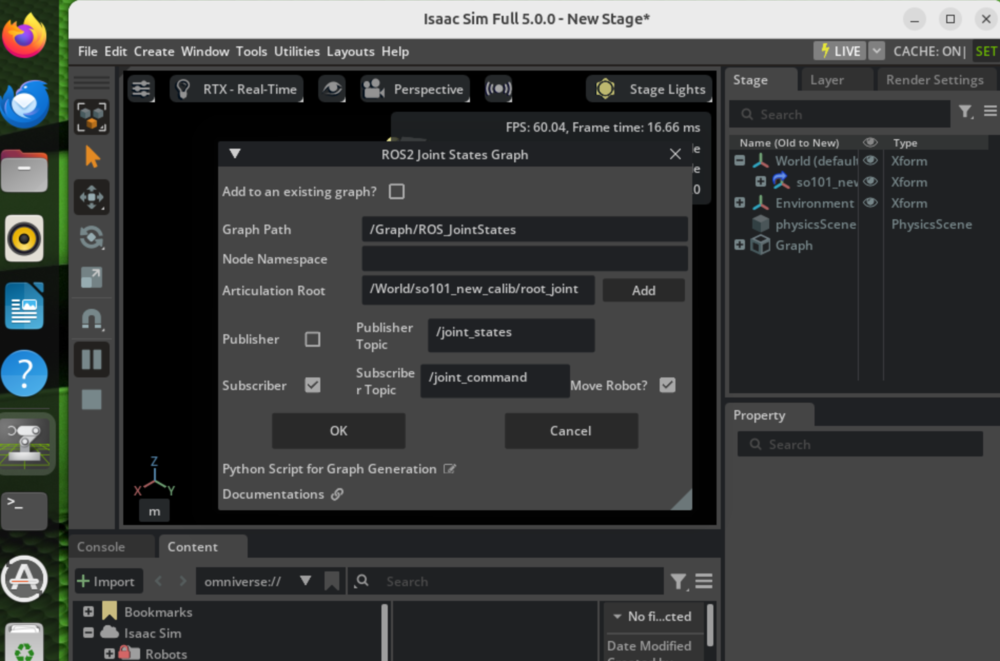
- Joint State Subscription Configuration: Tools → Robotics → ROS2 OmniGraphs → Joint States
 |
Configuration parameters:
- Articulation Root:
/World/so101_new_calib/root_joint - Enable Subscriber option
- Confirm and apply the configuration
 |
- Topic Relay Service Startup: Open a new terminal and run
ros2 run topic_tools relay /joint_states /joint_commandto convert state messages into command data. - Simulation Execution: Click the Play button on the left panel of the Isaac Sim interface to start the simulation. This enables real-time control of the robot within the remote simulation environment using the local teleoperation device.
 |
Phase 4: Toward an Enterprise-Grade Data Pipeline in an AI-Driven Development Ecosystem
Building on the ROS2–Isaac Sim cloud simulation infrastructure described above, this phase can establish an end-to-end AI-driven robotics development workflow.
Key AWS Service Integrations
- Amazon S3 – Data Lake Architecture: Leverage S3’s 11 9s of durability to build tiered storage, with S3 Intelligent-Tiering optimizing costs for managing large-scale robotics datasets.
- Amazon FSx for Lustre – High-Performance Storage: Provides sub-millisecond latency with a parallel file system, delivering optimized I/O performance for Vision-Language-Action (VLA) model training.
- Amazon SageMaker – ML Operations Platform:
- Use SageMaker Processing Jobs for large-scale multimodal data preprocessing
- Scale distributed training with Spot Instances, reducing training costs by up to 90%
- Leverage Model Registry for enterprise-grade version management and A/B testing
- AWS Batch – Large-Scale Parallel Simulation: Use Spot Fleets to provision cost-optimized GPU clusters that support large-scale parallel data generation in Isaac Sim.
- Amazon Kinesis – Real-Time Data Streams: Enable low-latency ingestion and processing of sensor data, supporting real-time robotic telemetry and analytics.
Summary
Architectural Value
The dual-entry AWS cloud robotics simulation architecture introduced in this article — combining the rosbridge WebSocket data channel and the Amazon DCV visualization channel — delivers an enterprise-ready development environment for robotics.
Key Advantages
1. Cloud-Native Elasticity
- On-demand scaling with AWS EC2 to support varying simulation workloads
- Dynamic GPU provisioning for optimal resource utilization
- Multi-region deployment to reduce latency globally
2. End-to-End Robotics Development
- Amazon S3 provides virtually unlimited and scalable data storage
- Seamless integration with AWS AI/ML services accelerates algorithm iteration
- Full lifecycle support for data generation, training, and simulation validation in the cloud
Conclusion
The AWS cloud robotics simulation platform represents a major step forward in how robotics development is conducted. Through the dual-entry architecture outlined in this article, developers can:
- Lower Barriers to Entry: Remove the need for costly hardware investment and broaden access to robotics innovation
- Accelerate Development: Enable faster cycles with parallel simulation and cloud-based collaboration
- Ensure Quality: Leverage enterprise-grade infrastructure to maintain stability and reliability
- Foster Innovation: Drive breakthroughs in intelligent robotics through deep integration with AWS AI/ML services
As cloud computing continues to advance—together with 5G, edge computing, and other emerging technologies—AWS-based robotic simulation platforms are poised to become a core enabler of digital transformation in the robotics industry, providing the foundation for building smarter and more efficient ecosystems.