Amazon Web Services ブログ
AWS Summit Japan 2026 ブース紹介 — 生成 AI 時代の製品設計開発
みなさんこんにちは。ソリューションアーキテクトの山田です。2026 年 6 月 25 日(木)、26 日(金)の 2 日間に渡って開催される AWS Summit Japan 2026 では今年も製造業に関する展示を数多く行なわれています。製造業に関連する全体的な展示やセッションに関してはこちらのブログに全体がまとめられておりますので参照ください。
本ブログではその中でも製品設計開発に関するデモ展示について紹介します。
コンセプト : 生成 AI 時代の製品設計開発
CAE 解析や CAD 操作、過去ナレッジの活用など、製品設計開発の現場にはエンジニアの専門性に強く依存する業務が数多く存在します。本展示では、フィジカル AI 時代の到来を見据え、エンジニアの設計開発を加速する 2 つの切り口で実機デモをご覧いただきます。
1. Engineering Development Hub( EDH )による PC / Workstation / HPC 環境の俊敏な立ち上げ
2. 設計開発の現場ですぐに実践できる生成 AI ユースケース
「フィジカル AI 時代の研究開発をどう加速するか」を、現場のエンジニア目線で体感いただける展示です。
1. Engineering Development Hub( EDH )
EDH は 専用 Web ポータルによって設計開発に従事する方が使用する PC / Workstation / HPC 環境をクラウド上にセルフサービスで立ち上げることができるシステムです。3D モデリング、大規模シミュレーション、 CAE 解析、 GPU を用いたモデル作成に至るまで、フィジカル AI 時代の研究開発においてはこれまで以上に多彩なツールチェーンと、それを効率よく実行する多種多様なコンピューティング環境が必要となります。EDH はクラウドの柔軟性を活かした多様な要件に対応できる仮想ワークステーション環境とスケーラブルな HPC 基盤を 1 つのシステムとして提供。専用の Web ポータルによりエンジニアは直感的に必要なデスクトップ環境を取り出し、大規模に CPU/GPU を使用した分散学習やシミュレーションを実行することができます。
EDH は以前 Scale-Out Computing on AWS(SOCA)として知られていたソリューションの後継で、2026 年 4 月にリブランドされ、新たにリリースされました。SOCAの派生としては RES (Research and Engineering Studio on AWS) もリリースされておりますが、RESはVDIに特化したソリューションです。VDIに加えてHPCの機能も統合して利用したい場合は今回ご紹介するEDHの利用をご検討ください。
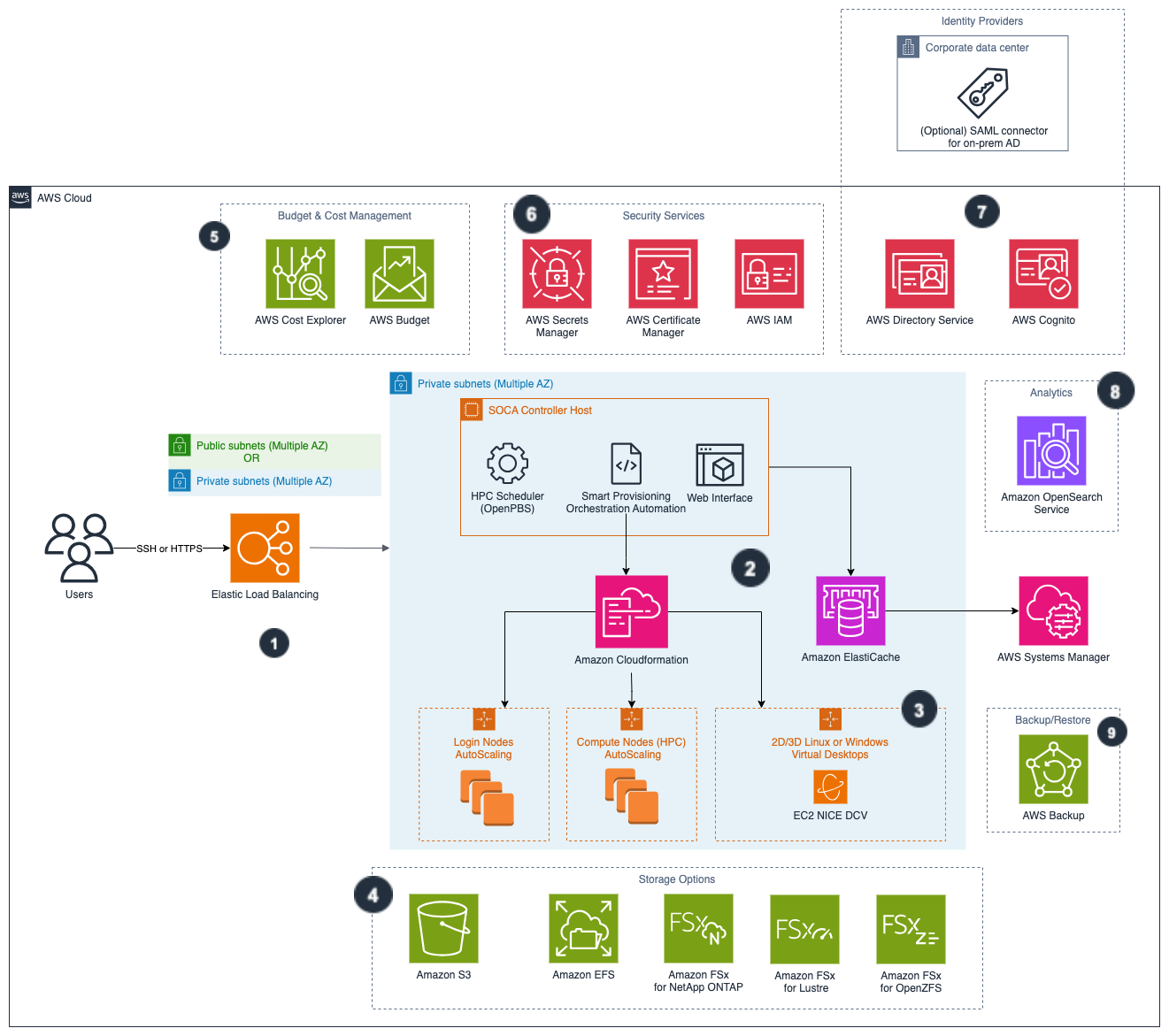
Engineering and Development Hub (EDH) アーキテクチャ図
EDH の主な特徴
- 仮想デスクトップによるインタラクティブ処理
- Amazon DCV を用いた高性能なリモートデスクトップ環境で、CAD ソフトウェアの 3D 描画もスムーズに操作できます。Windows と Linux の両方に対応し、GPU インスタンスを選択することで、>オフィスにいなくてもワークステーション級の作業環境にアクセスできます。
- HPC を使った大規模バッチ処理
- Slurm、OpenPBS、IBM LSF といった主要なジョブスケジューラに対応し、ジョブ投入に応じて計算ノードが自動的にスケールアウトします。EFA(Elastic Fabric Adapter)による低遅延ネットワークで、大規模並列処理のスケーリングも問題ありません。処理が完了すればノードは自動的に終了し、課金が停止します。
- 専用 Web インタフェースによる直感的な利用
- EDH には専用の Web ポータルが付属しており、以下のような操作をブラウザから直感的に行えます。コマンドラインに不慣れなエンジニアでも、すぐに使い始められるのが特徴です。
- 仮想デスクトップの起動・停止
- HPC ジョブの投入・状態監視
- ファイルの管理とアップロード
- 利用状況の可視化とコスト確認
- EDH には専用の Web ポータルが付属しており、以下のような操作をブラウザから直感的に行えます。コマンドラインに不慣れなエンジニアでも、すぐに使い始められるのが特徴です。
- Amazon EC2 の高い汎用性
- EDH の計算リソースは Amazon EC2 上に展開されるため、実行するアプリケーションや処理の規模に合わせて最適なスペックのインスタンスを選択できます。
- CPU:x86(Intel / AMD)、Arm(Graviton)
- GPU:NVIDIA L4、A10G、A100、H100 etc.
- メモリ:数 GB から数 TB まで
- OS:Amazon Linux、RHEL、Ubuntu、Windows Server etc.
- EDH の計算リソースは Amazon EC2 上に展開されるため、実行するアプリケーションや処理の規模に合わせて最適なスペックのインスタンスを選択できます。
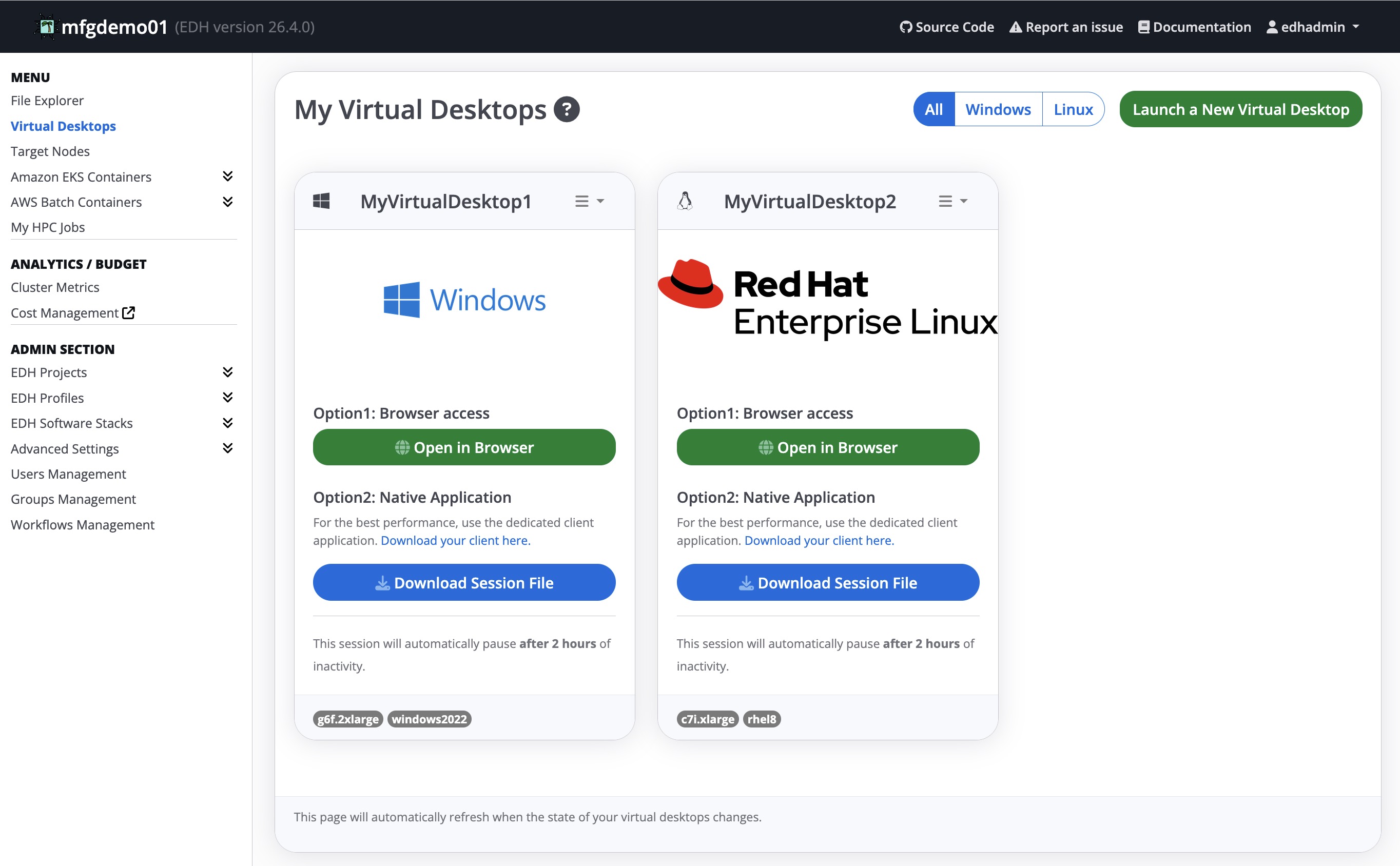
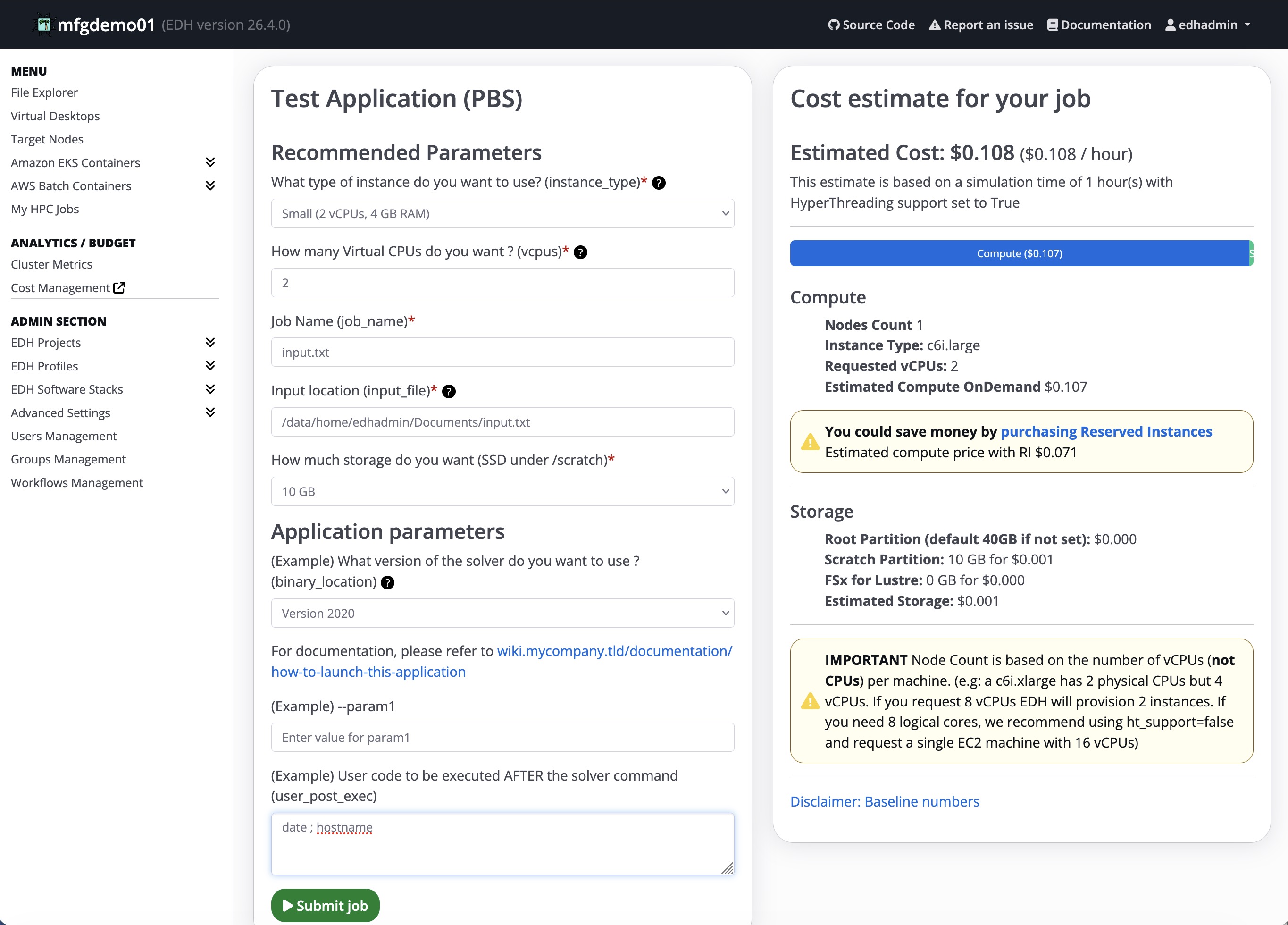
EDH の仮想デスクトップ管理画面と HPC ジョブ投入画面
EDH のユースケース
EDH は以下のような設計開発ワークロードで活用することができます。もちろんこれら以外にも仮想デスクトップや HPC 環境を必要とするワークロード全般に適用可能であり、汎用性の高いソリューションです。
- CAD:3D モデリング、設計・製図
- CAE:構造解析、流体解析、熱解析
- 材料シミュレーション:分子動力学、第一原理計算
- EDA:半導体設計、論理合成、検証
- フィジカル AI:ロボティクス開発、強化学習
EDH のリソース他
Engineering Development Hub(EDH)はオープンソースで公開されているため、すぐに試すことができます。
- ソースコード: github.com/awslabs/engineering-development-hub
- ドキュメント: awslabs.github.io/engineering-development-hub-documentation
AWS Summit Japan 2026 会場内の AWS for Industries Zone ブース (ブース ID:A021) で、EDH の実環境をご覧いただけます。ぜひ実際のデモをご覧ください。
2. 設計開発の現場ですぐに実践できる生成 AI ユースケース
自然言語による CAD/CAE 操作のアシストや、時間のかかるシミュレーションを AI で高速化するサロゲートモデルなど、明日からでも取り入れられる「使える AI」の活用例をご紹介します。
その場でご覧いただける動作デモに加え、後日体験できるワークショップもご用意しているので、AI が設計業務をどう変えるのかをじっくり実感いただけます。
生成 AI × CAD + CAE + NVIDIA Isaac による フィジカル AI シミュレーション
本デモでは、AWS の AI コーディングアシスタント Kiro に自然言語で指示するだけで、1 台の産業用 6 軸ロボットアームを題材に、設計 → CAD 編集 → 強度解析(CAE) → ロボットの動作学習までを一気通貫で実行する様子をご覧いただけます。
フィジカル AI 時代に求められる「設計してから、実際に動かして学習させるまで」の流れを、コードを 1 行も書かずに体感できる展示です。
設計開発の現場に多く存在する、専用ソフトの習熟や、複雑な製図・シミュレーションといった時間を要する業務を効率化する効果が期待できます。
注記:Kiro CLI の基盤モデルは検証を進めた期間中にアップデートが重なったため、工程ごとに Claude Opus 4.6 / 4.7 / 4.8 を使用しています(どの工程でどのバージョンを使ったかは、後述の詳細記事シリーズにそれぞれ明記しています)。
本デモ動画の撮影時点では Claude Opus 4.8 を使用しました。モデルのバージョンによって、生成されるコードの品質や挙動は変わる場合があります。
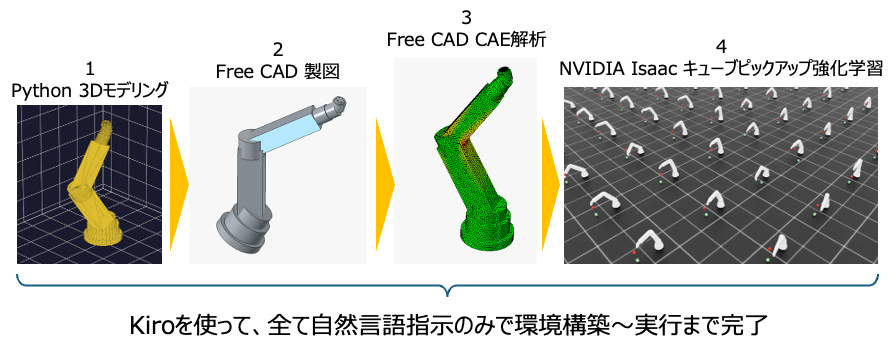
デモの流れ — 1 台のロボットアームを 4 ステップで設計
同じ 1 つの形状データを引き継ぎながら、すべての工程を Kiro への日本語の指示だけで進めます。
AWS Summit Japan 2026 展示動画(YouTube : 3分58秒)
1. 3D 形状をつくる
寸法を言葉で伝えるだけで、ロボットアームの 3D モデルを生成します。CAD ソフトを使わず Python だけで STL ファイル(※3D 形状のデータを見るのに向いた形式)を作り、関節角度から先端位置を求める順運動学(※各関節を何度曲げると腕の先端がどこに来るかを求めるロボット設計の基本計算)の検算まで Kiro が自動で実施。このモデリングを実時間 4 分 28 秒で完了しました。
技術詳細解説ブログ
プロンプト例:
産業用6軸多関節ロボットアームの3Dモデルを生成する generate_robot_arm.py という Pythonスクリプトを構築してください。
numpy-stl、numpy、matplotlib のみを使用してください。
■ ロボットアーム構成(ベースから先端へ):
1. ベース(J1軸: 旋回) — 固定台座: 円筒 直径300mm 高さ50mm、旋回部: 円筒 直径250mm 高さ100mm
2. ショルダー(J2軸: 前後傾動) — 関節ハウジング: 直径200mm 高さ150mm
3. 上腕(リンク1) — 長さ500mm、断面: 150mm x 120mm
4. エルボー(J3軸: 上下傾動) — 関節ハウジング: 直径160mm 高さ120mm
5. 前腕(リンク2) — 長さ450mm、断面: 120mm x 100mm
6. 手首(J4/J5/J6軸) — 3段の円筒
7. エンドエフェクタ(ツールフランジ) — 直径63mm(ISO 9409-1準拠)、ボルト穴6個
■ 姿勢パラメータ:
- J1〜J6の関節角度を変数化し、順運動学(FK)で各リンクの位置・姿勢を計算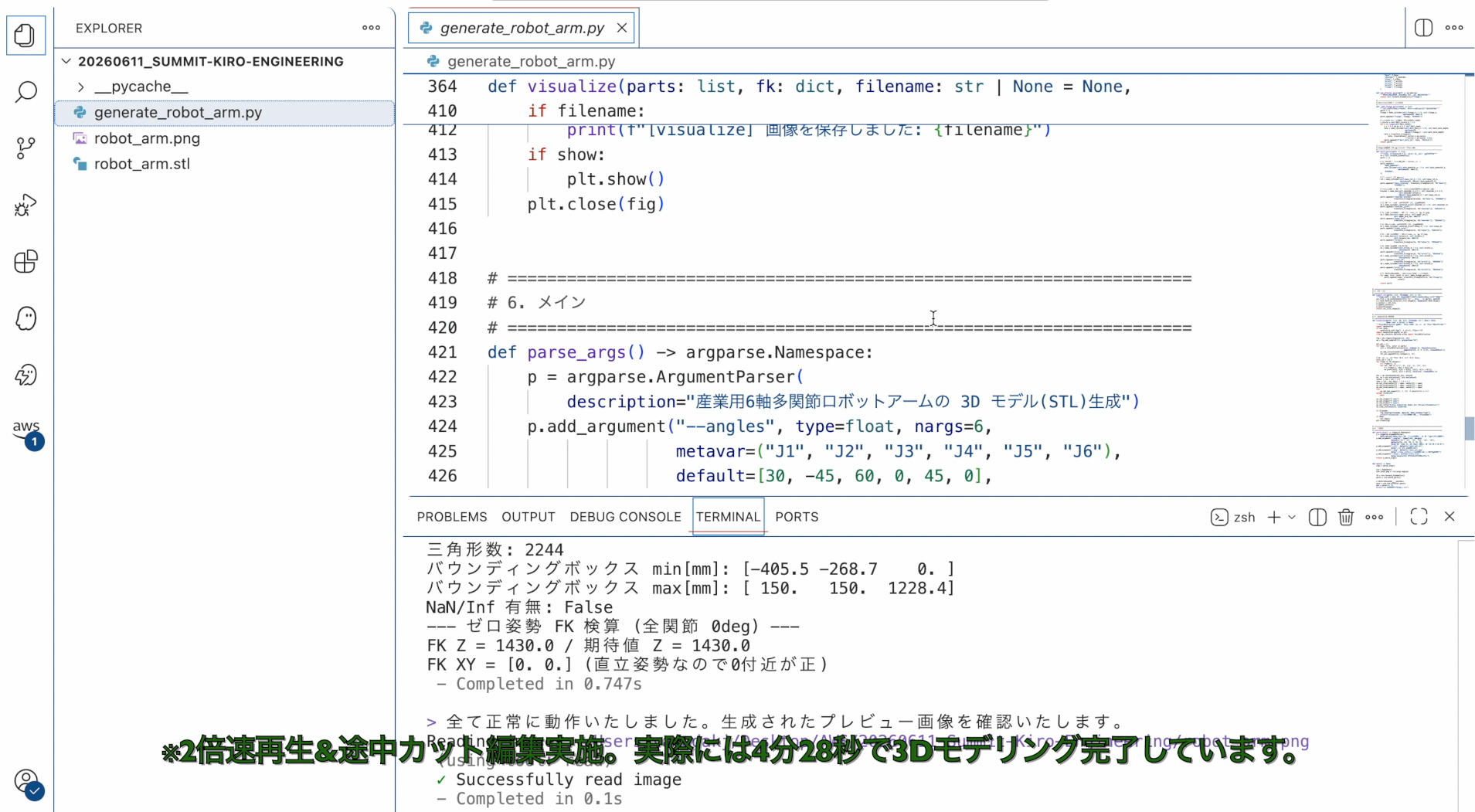
Kiro が 3D モデリング用のコードを作成し実行している様子
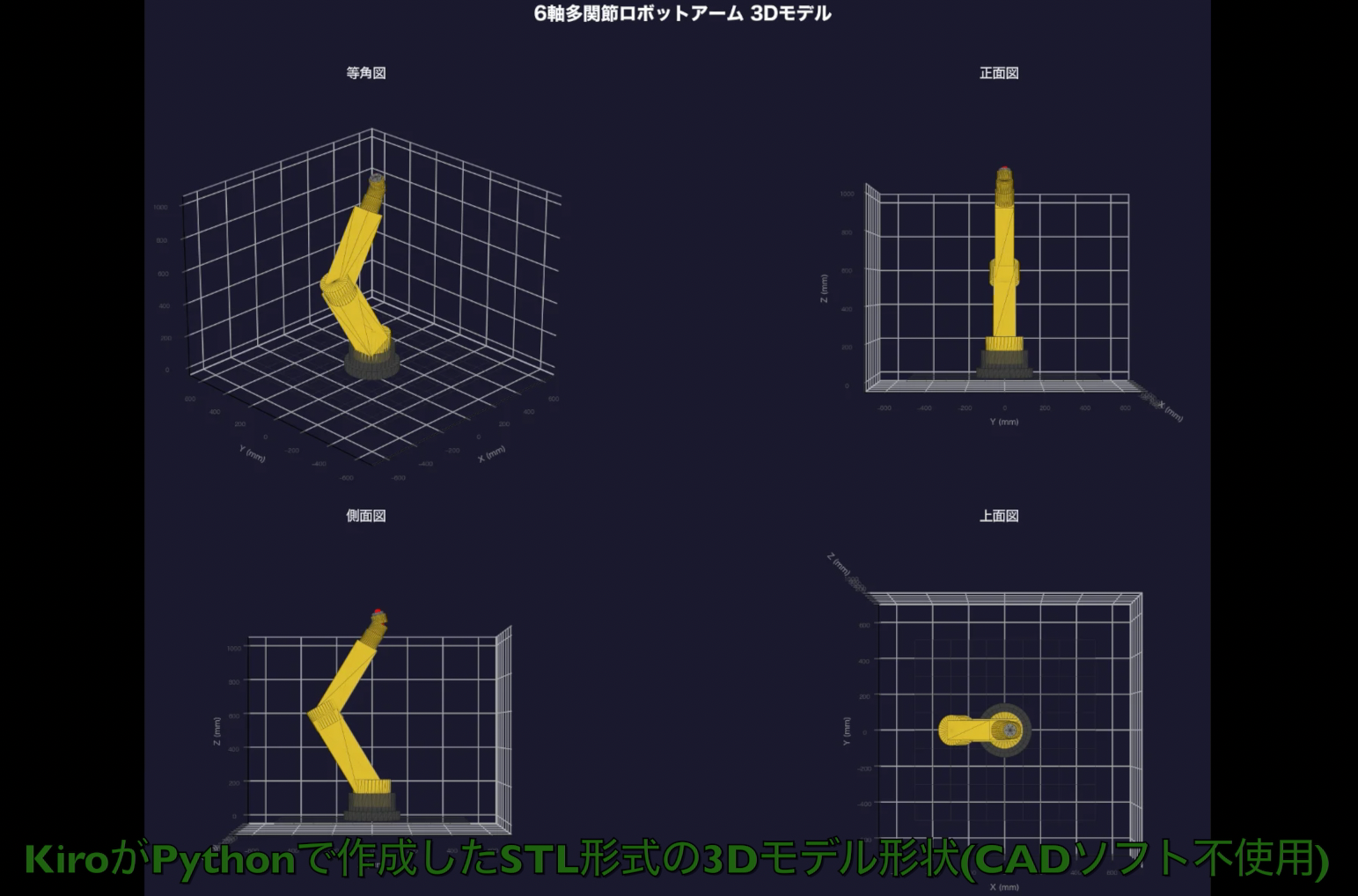
完成したロボットアーム 3D モデル STL ファイル
2. 形を編集する
CAD で編集できる STEP ファイル(※3D 形状の CAD ソフトで編集するのに向いた形式)に作り直し、オープンソースの 3D CAD ソフト FreeCAD で、角の丸め(フィレット)や穴あけといった加工を追加します。GUI 操作だけでなく、Kiro が FreeCAD Python API を用いてヘッドレス(GUI なし、コマンドラインとスクリプトだけ)でも編集を実行できることを示します。
技術詳細解説ブログ
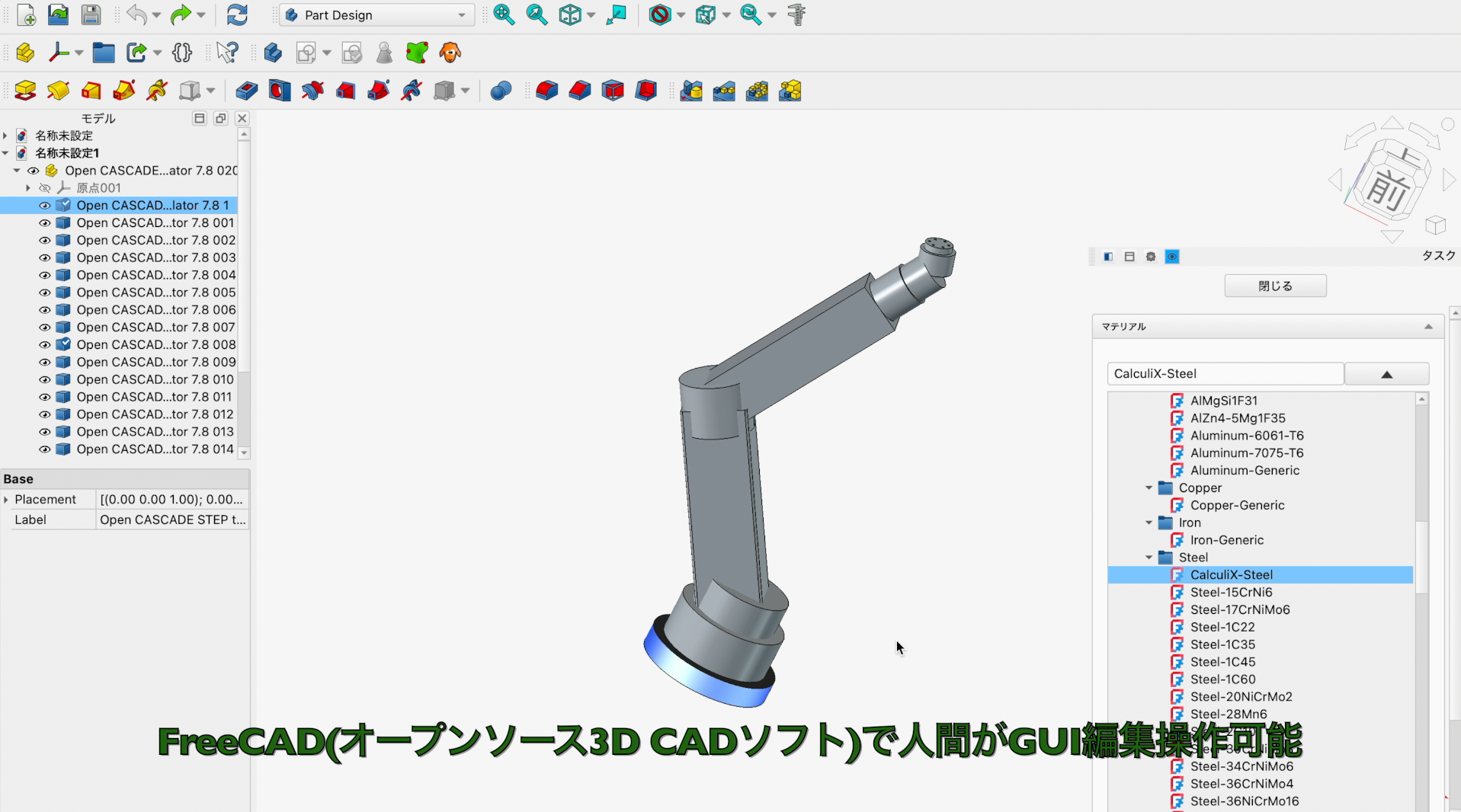
Kiro が作成したロボットアーム図面をベースに、FreeCAD で人間が編集操作を行っている様子
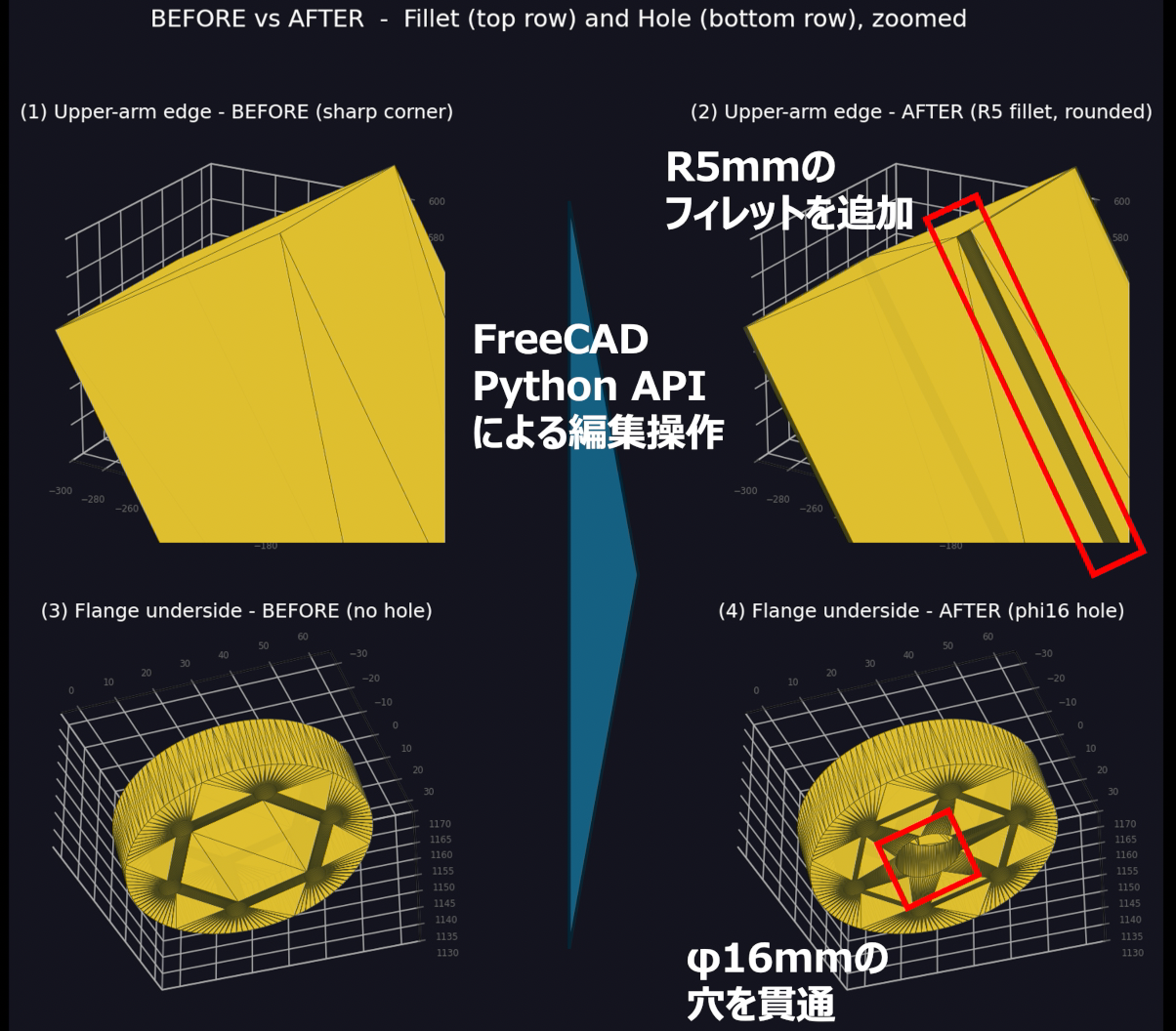
Kiro が自然言語指示によりヘッドレスでロボットアーム図面編集操作を行った結果(編集前後比較)
3. 強度を確かめる
完成した形に荷重をかけ、応力やたわみを計算する構造解析(CAE)を実行します。今回は材料をアルミ合金 6061-T6、ベース底面を固定し、先端のフランジに 100 N(約 10 kg 相当)の下向き荷重をかける条件で解析しました。部品の結合からメッシュ分割、材料・拘束・荷重の設定、ソルバー実行、結果の可視化までを Kiro が担当し、最大応力(フォン・ミーゼス応力)約 0.13 MPa・最大変位は 5.76 μm という結果を得ています。途中でエラーが出れば自ら原因を切り分け、手法を見直しながら解析を完走させます。
技術詳細解説ブログ
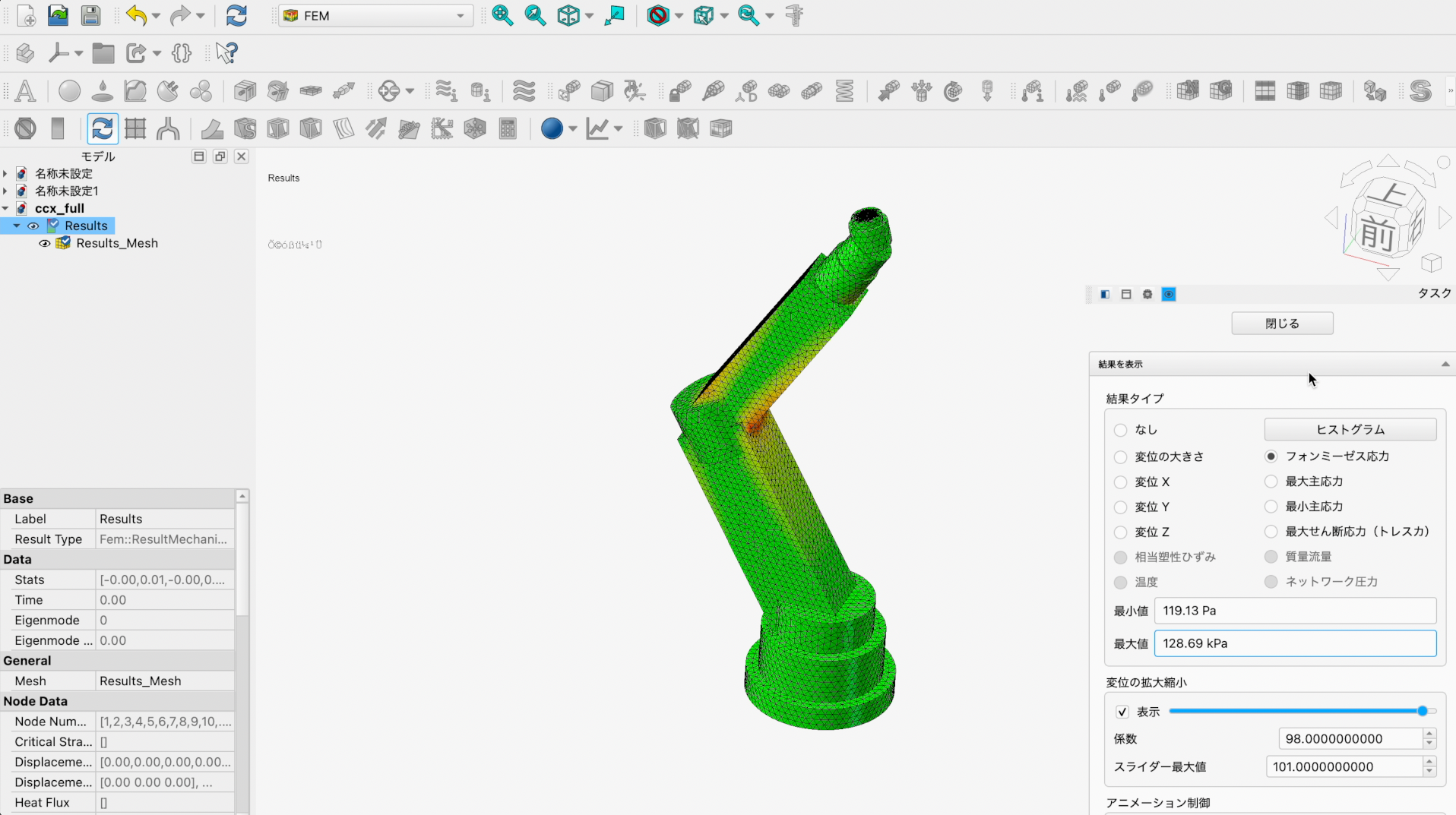
Kiro が FreeCAD で CAE 実行した結果を人間が GUI で確認している様子
4. 動かして学ばせる
設計したアームに吸盤を付け、NVIDIA Isaac Sim / Isaac Lab 上で「キューブを持ち上げて運ぶ」動作を強化学習(※ロボットに動きを試行錯誤させ、うまくいくほど報酬を与えて自分で上達させる AI の学習方法)させます。4096 体のロボットを 1 枚の GPU で同時に動かし、学習開始直後はほぼ 0% だった成功率を、学習後にはピックアップ(持ち上げ)成功率 91.5%、目標位置への運搬・保持も 77.9% まで引き上げました。
技術詳細解説ブログ
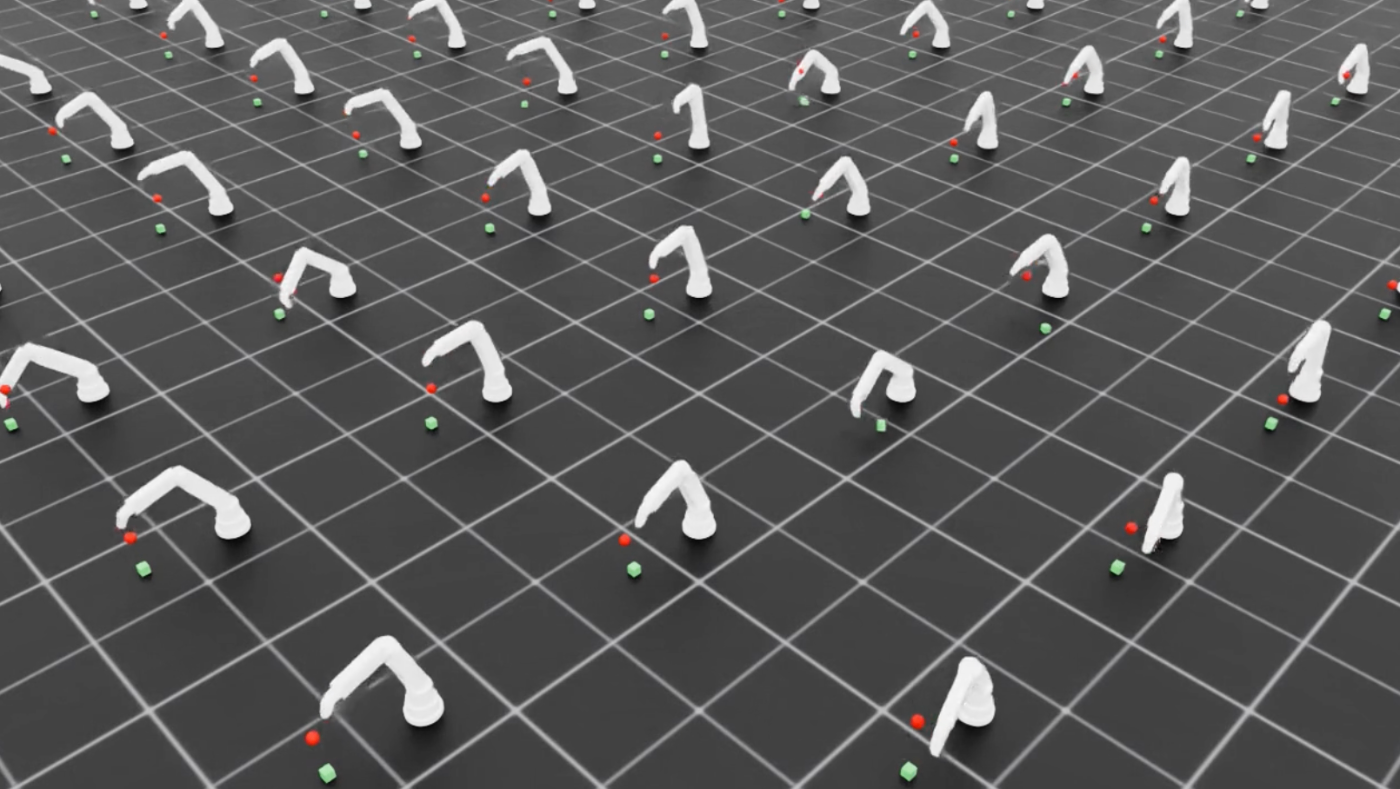
4096 体のロボットを NVIDIA Isaac Sim / Isaac Lab 上でキューブピックアップ強化学習している様子
AIを活用した設計開発のポイント
-
つくりたいものを、言葉にするだけ
- 専用ソフトの習熟や環境構築も AI が肩代わり。設計の参入障壁が下がる。
-
時間がかかる作業が、速く・再現性高く
- 日々の製図も解析も手間を大幅削減。初期検討を素早く回せる。
-
未知の領域にも、踏み込める
- 強化学習のような未経験分野も AI が調べて試す。学びながら新スキルが身につく。
-
仕上げと判断は、人
- 本番品質には専門家の判断と検証が要る。AI は作業役、決めるのは人。
著者について
 山田 航司 (Koji Yamada)
山田 航司 (Koji Yamada)
AWS のソリューションアーキテクトとして、製造業のお客様を中心にクラウド活用の支援を行っています。製造業における業務課題解決や新規ビジネスにおけるクラウド活用の可能性をお客様と一緒に探求しています。