AWS Robotics Blog
Category: Uncategorized
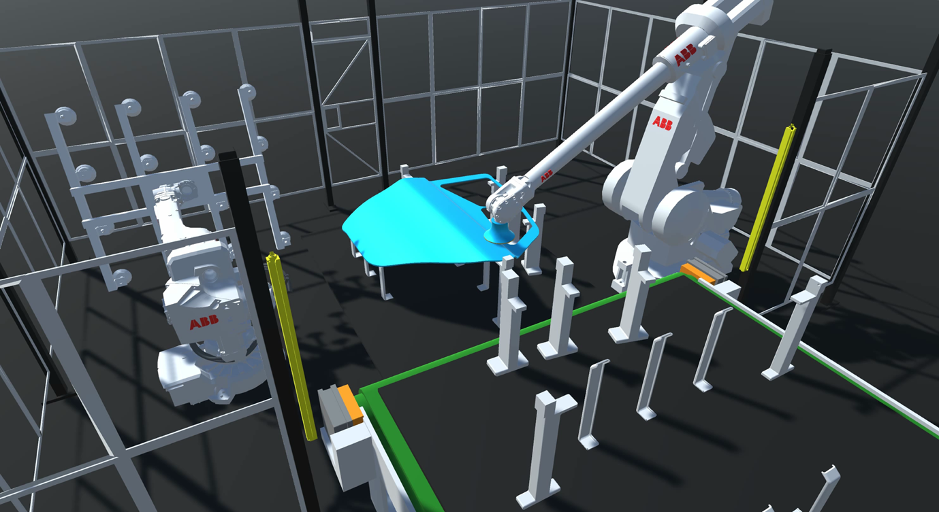
Adaptive Reprogramming of Industrial Robots and Toolpath Validation in the Cloud
Guest Blog By Sebastian Andraos, Chief Executive Officer, HAL Robotics Ltd. At HAL Robotics, we enable the automation of variable, complex, and uncommon tasks with robots. Over the past 8 years, our software has powered innovation for multi-nationals and subject matter experts in aerospace, construction, transportation, and food & beverage. The HAL Robotics Framework provides […]

Build headless robotic simulations with AWS Batch
Introduction Headless robotic simulations with AWS Batch allow robot developers to increase their velocity by running their code through thousands of scenarios and iterating before moving onto physical device testing. The real-world environments and situations a robot can find itself in are nearly endless. What’s worse, it is time consuming and costly to deploy and […]

Build and Simulate Robotics Applications in AWS Cloud9
AWS Cloud9 is a cloud-based integrated development environment (IDE) that lets you write, run, and debug your code with just a browser. It includes a code editor, debugger, and terminal. AWS Cloud9 comes prepackaged with essential tools for popular programming languages, including JavaScript, Python, PHP, and more. Since AWS Cloud9 IDE is cloud-based, you can […]
Preparing ROS application and simulation containers for AWS RoboMaker
In October 2021, we released support for containers in AWS RoboMaker to make it easier for more customers to bring and run their simulations. In this blog, we show you how to use containers to build and package Robot Operating System (ROS) applications to run in AWS RoboMaker. When AWS RoboMaker was first released, we […]

Improving control of diagnostic tools in simulations with AWS RoboMaker tool configuration
AWS RoboMaker released a tool configuration feature that allows customers to improve control of diagnostic tools with their simulations. This new level of control allows users to configure which default tools to run, change the commands used to run them, and add additional tools. In this blog, we walk through two procedures. First, we walk through how to add a configuration to an existing tool and, second, how to add a new tool to your simulation.

How INESC TEC tests and deploys ROS applications with AWS RoboMaker
The Institute for Systems and Computer Engineering, Technology, and Science (INESC TEC) is a research and development institute headquartered at the University of Porto in Portugal. In this blog, we discuss how robotics researchers at INESC TEC automate testing and deployment of their Robot Operating System (ROS)-application in AWS RoboMaker simulation.

Deploying ROS applications as Snaps with AWS IoT Greengrass 2.0
AWS recently announced the release of AWS IoT Greengrass 2.0, an edge runtime that offers added flexibility in deploying containerized applications than its predecessor. In this blog, we’ll explore why this improvement is useful for the robotics community, and walk through how you package and deploy Robot Operating System (ROS) applications to devices using AWS IoT Greengrass 2.0.
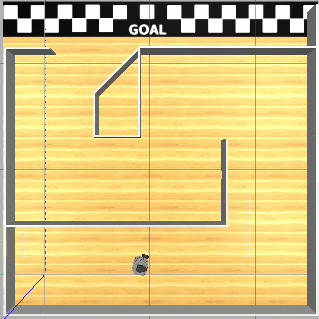
Escape from the maze by training a Reinforcement Learning model on AWS RoboMaker
In this blog, we walk you through the steps required to train a machine learning model using RL on AWS RoboMaker. Specifically, we familiarize you with the development environment, then define the steps required to complete RL machine learning within AWS RoboMaker.

Build an Alexa controlled robot with AWS RoboMaker
This blog references AWS RoboMaker Integrated Development Environment (IDE), a feature that has been deprecated. To follow along with this blog post, use the AWS Cloud9 IDE. See our updated blog on how to Build and simulate robotics applications in AWS Cloud9. Introduction Alexa is Amazon’s cloud-based voice service and Alexa-compatible devices allow users to […]
ROS 2 Foxy Fitzroy: Setting a new standard for production robot development
The highly anticipated Robot Operating System 2 distribution Foxy Fitzroy (ROS 2 Foxy) has been released. ROS 2 Foxy is the most secure and reliable ROS distribution to date for production robotics application development. In this blog, we highlight key features and improvements available in this new release.