Amazon Web Services ブログ
フィジカル AI の実践: 人間と機械の相互作用を支える技術基盤
本記事は 2025/11/25 に公開された “Physical AI in practice: Technical foundations that fuel human-machine interactions | Artificial Intelligence” を翻訳したものです。
前回の投稿「AI で物理的世界を変革:インテリジェント自動化の新たなフロンティア」では、フィジカル AI の分野が建設、製造、ヘルスケア、農業など幅広い産業を再定義していることを解説しました。今回は、この技術の背後にある完全な開発ライフサイクル、つまり単に指示に従うだけでなく、協働し、要件を予測し、共通の目標に向けて積極的に推進することで、人間と真のパートナーシップを築くインテリジェントシステムを作成するプロセスに注目します。
このワークフローの実例として、Diligent Robotics がフィジカル AI の原則を適用して、病院環境で臨床チームを支援する移動ロボットをどのように開発しているかを紹介します。また、業務と顧客体験の両方を改善できるフィジカル AI ソリューションを導入しようとしているビジネスリーダー向けに重要な考慮事項も共有します。
フィジカル AI の定義
人間と機械の関係は、根本的な変革を遂げつつあります。直接的な人間の制御下にある単純なツールとして始まったものが、今では、知的な機械がコンテキストを理解し、意図を解釈し、自律的な意思決定を行うことができる高度なパートナーシップへと進化しています。
「フィジカル AI」という用語は、対話的かつ反復的なシステムを指します。フィジカル AI とは、さまざまなパターンで要素が連携し、物理世界を理解し、推論し、学習し、相互作用するプロセスです。自律性フライホイールの各ステップにおいて、要素は継続的に学習と改善を重ね、次のステップへと進化を促します。
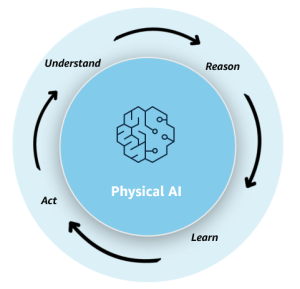
このプロセスは理解から始まります。ここでは、モデルとアルゴリズムをセンサー、実世界データ、シミュレーションデータと統合し、これらのデータセットを用いて推論能力を構築します。次に、推論モデルが物理世界でリアルタイムに実行されるアクションを予測します。しかし、これらのインテリジェントシステムのプロセスはそこで終わりません。システム全体のパフォーマンスを向上させるため、フィードバックループを通じて継続的に学習を重ねる必要があります。
人間と機械のチームワークのためのエンドツーエンドのフィジカル AI ワークフロー
この高度な自律性における次の飛躍には、何が必要となるのでしょうか?フィジカル AI ソリューションの開発と展開は、データの収集と準備、モデルのトレーニングと最適化、エッジでの運用を含む反復的なプロセスです。開発ライフサイクルは次の図に示されています。それぞれの要素を見ていきましょう。
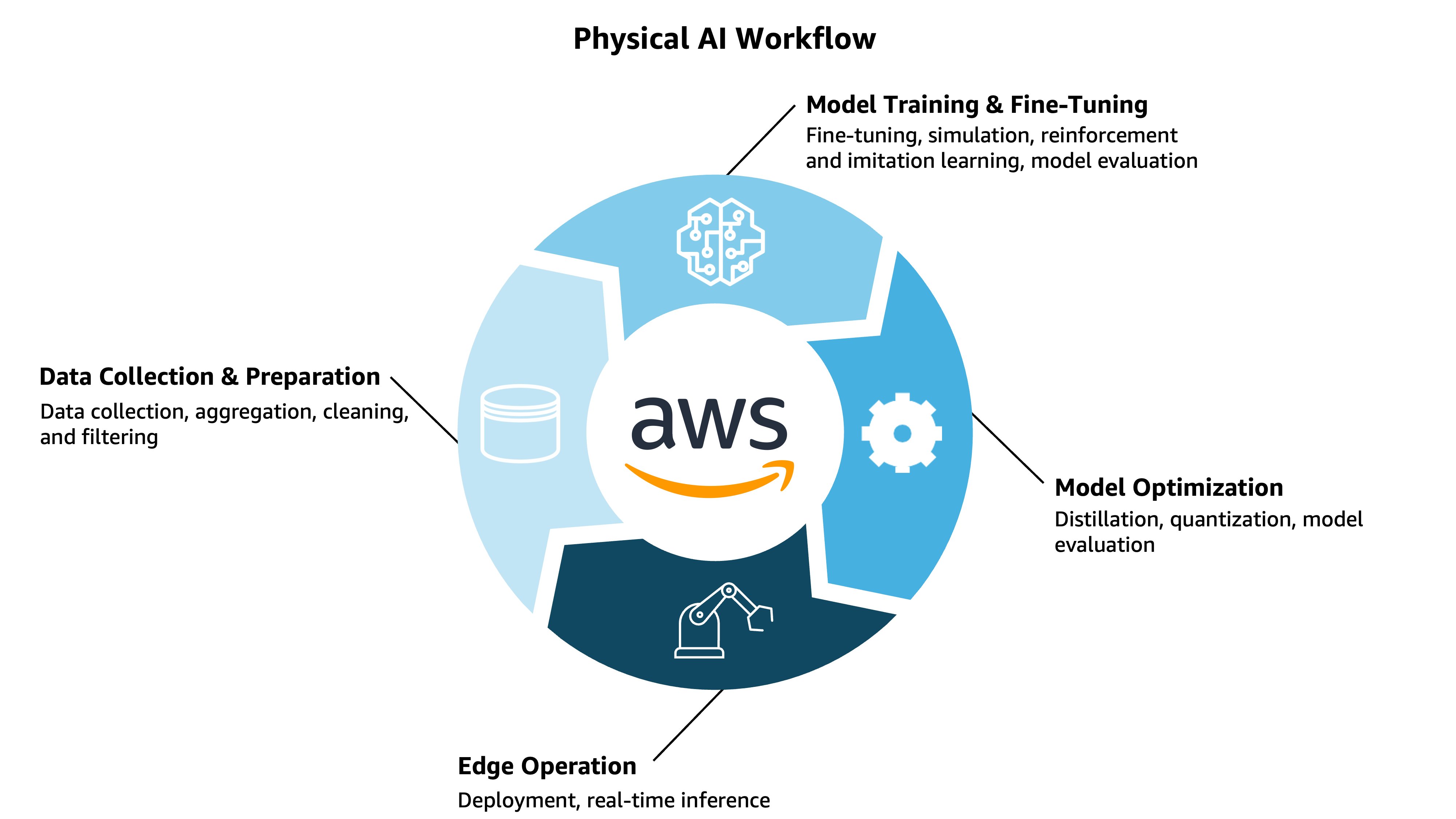
データの収集と準備
ワークフローの最初のステップは、モデルのトレーニングや評価といった後続タスクのために、データを収集し準備することです。これには、特定のアプリケーション向けに独自に収集したデータのほか、オープンソースデータやシミュレーションデータが含まれます。これらのデータソースは、後続タスクに応じて保存、クレンジング、フィルタリングが行われます。
モデルのトレーニングとファインチューニング
フィジカル AI システムを現実世界と効果的に相互作用できるようトレーニングすることは、従来の機械学習アプローチを超える独自の課題を伴います。これらのシステムは、複雑で動的な環境を移動し、さまざまな特性を持つ物体を操作し、予期しない状況に適応することを学習する必要があります。多様な実環境で確実に動作する、有能かつ堅牢なフィジカル AI システムを開発するための専門的なトレーニング手法が登場しています。これらには以下が含まれます:
- 強化学習:自律機械は、環境との試行錯誤による相互作用を通じてスキルを学習できます。ラベル付きデータセットを必要とする教師あり学習とは異なり、強化学習では、報酬関数を最大化することで、フィジカル AI システムが経験から直接学習することができます。
- 物理知識を組み込んだ強化学習:学習プロセスに物理的知識を統合して、サンプル効率と汎化性能を改善します。このアプローチは、純粋なデータ駆動型手法と従来の物理ベースの制御との間のギャップを埋めるのに役立ちます。
- 模倣学習:フィジカル AI システムは、試行錯誤ではなく、人間によるデモンストレーションから学習できます。このアプローチは、報酬関数で指定することが難しいものの、人間が容易に実演できるタスクに特に有効です。行動クローニングや逆強化学習などの技術により、ロボットは人間の行動を観察し、その背後にあるポリシーや報酬関数を推測することができます。
- シミュレーションベースのトレーニング:物理システムの仮想レプリカを提供し、実環境での展開前に安全かつ費用対効果の高いトレーニングをサポートします。デジタルツインは、専門的な AI モデルのトレーニングのためのシミュレーションシステムとして機能し、開発者は実環境での展開前にロボットの動作をテストおよび改良できます。シミュレーションベースのトレーニングは、安全性、速度、スケーラビリティ、再現性、費用対効果などの利点を提供します。
モデルの最適化
モデルのトレーニングが完了すると、特定のハードウェア、レイテンシー要件、計算コスト、パフォーマンスなどに合わせて最適化できます。モデル最適化の手法には以下が含まれます:
- 量子化:重みと活性化の数値精度を削減します。一般的な量子化手法には、
float32からfloat16への変換、float32からint8への変換などがあります。量子化により、メモリ使用量を削減し、推論速度を向上させることができます。 - 蒸留:大規模なモデルから小規模なモデルへ知識を転送しながら、パフォーマンスを維持します。小規模なモデルは、低性能なハードウェアにも展開でき、計算コストも低くなります。
エッジ対応モデルは、実環境・シミュレーション環境でのタスクで評価されます。モデルのトレーニング・最適化は、目標とするパフォーマンスが達成されるまで反復的に改良されます。
エッジ操作
最後に、最適化されたモデルは現場に展開され、実環境の実際のハードウェアで機能を検証します。システムは運用データと性能指標を継続的に収集し、これらを分析のためにクラウド環境へ体系的に送信します。クラウド基盤では、追加のモデルトレーニングと最適化を実行できます。修正されたモデルはエッジに再展開され、そこでモデル推論(エッジコンピューティング)が実行されます。エッジコンピューティングでは、ロボットアームの停止やゲートの開閉といった決定とアクションが行われます。このセンシング、推論、実行のワークフローが、継続的な改善サイクルを生み出します。ミッションクリティカルなアプリケーションでは、わずか数ミリ秒でアクションを予測する能力が重要となります。
実践における技術:Diligent Robotics がヘルスケアをどのように変革しているか
インテリジェントシステムがニーズを予測し、人間と協働するこのプロアクティブなパートナーシップを支える技術は、単なる理論ではありません。これらの技術はすでに実装されており、具体的な成果を上げています。例えば、リスクが高く、人間とのつながりが極めて重要なヘルスケア分野での活用が挙げられます。
看護師の日常を考えてみましょう。看護師は通常、患者ケアから離れざるを得ない業務に1日の多くの時間を費やしています。例えば、薬剤の配送、検体の搬送、物品の調達などです。AWS Physical AI Fellow である Diligent Robotics は、上述のワークフローを用いてこの課題に取り組んでいます。Moxiは、日常的な物流業務を処理し、看護師とその患者に貴重な時間を取り戻すために設計された移動型マニピュレーションロボットです。

Moxi の知能は、病院環境から継続的に学習することで成長します。ロボットは運用データを収集し、それを基盤モデルに供給します。この反復プロセスにより、Moxi の信頼性が向上し、医療施設の複雑かつ動的な環境を移動する能力が高まります。モデルは効率性のために最適化され、計算能力の削減と処理速度の向上を実現します。これにより、エッジへの展開が可能になります。エッジ展開により、Moxi はエレベーターのボタンを押す、ドアを開けるといった動作をリアルタイムで自律的に判断できます。これは、常時接続に依存できない安全性が重要な環境では極めて重要です。
結果は顕著で、Diligent Robotics は次のように報告しています:
- 120 万回以上の配達 が Moxi の病院艦隊全体で完了しました
- 病院スタッフの 60 万時間近く の節約
Moxi は全国の医療システムで成果を上げています。例えば、ニューヨーク州のロチェスター・リージョナル・ヘルスでは、Moxi ロボットが以下のような成果を実現しています:
- 薬剤配送ワークフローの改革:Meds to Beds プログラムなどにおいて、Moxi が緊急性の高い薬剤配送をサポートすることで、退院遅延を削減し、患者満足度を向上させ、再入院を最小限に抑えています
- 検査ワークフローの効率化:検査結果の確実性と迅速性を向上させ、患者への提供を改善しています
Moxi の影響は数字以上のものです。ロチェスター地域保健のチーフファーマシーオフィサーは次のように述べています。「私たちは次世代のヘルスケアを設計することに焦点を当てており、そのためには可能な限りあらゆるところで革新を行っています。Moxi は私たちの業務に欠かせないものとなっています。」
Diligent Robotics の創設者兼 CEO である Andrea Thomaz は次のように述べています。「臨床チームが Moxi と『おはよう』と挨拶を交わしたり、ハイファイブをしたり、さらには『今週の従業員』と名付けたりするなど、チームの本当のメンバーとして Moxi と交流しているのを見るのは、最も報酬の高い人間とロボットの経験の 1 つです。」
フィジカル AI の今後の方向性
フィジカル AI の今後の道筋は、実環境でその価値を証明している先進的な導入企業によってすでに切り開かれています。病院ではバーンアウトを削減し患者ケアを向上させ、工場では安全性と一貫性を高めています。これらの成果は明確なメッセージを示しています。成功は大規模な刷新からではなく、測定可能な成果をもたらす、焦点を絞ったインパクトの大きい用途から生まれるということです。
最先端技術だけでソリューションを構築するだけでは不十分です。フィジカル AI システムが私たちの世界により深く統合されるにつれ、ビジネスリーダーにとって適切なガバナンスが不可欠になっています。最近のブレイクスルーは新たな機会をもたらす一方で、新たな課題も生み出しています。企業リーダーは以下の点に対処する必要があります:
- サイバーセキュリティ:クラウド接続されたロボット群向けのセキュリティ対策
- 相互運用性:システムと既存インフラストラクチャ間の互換性確保
- 安全機構:適応的アプローチと冗長システムを含む安全対策
- 倫理的枠組み:透明性、公平性、プライバシーを確保する仕組み
規制手法は管轄区域によって異なります。例えば、EUは安全性・倫理に対応する包括的な枠組みを採用していますが、米国は業界主導による分野別アプローチを採用しています。
ビジネスリーダーは、一貫したグローバル運用を維持しながら、これらの異なる基準に対応する必要があります。リスクベースのガバナンス手法は効果的な戦略となります。これは、AI アプリケーションを潜在的な影響に基づいて分類し、それに応じて適切な管理策を適用するものです。このバランスの取れた手法は、多様な規制要件を満たしつつ、継続的なイノベーションに必要な俊敏性を維持します。
小規模から始め、迅速に学習し、成功したものをスケールアップすることで、組織は持続的な能力を構築し、明確な ROI を実現し、フィジカル AI 革命の最前線でより広範な実装に向けた態勢を整えることができます。未来を切り開くのは、ガバナンス、安全性、倫理的配慮に積極的に対処しながら、デジタルインテリジェンスと物理的能力を統合できる組織です。
AWS、MassRobotics、NVIDIA が推進する Physical AI Fellowship のようなイニシアチブは、この種の進歩を加速するために必要な協力的精神を体現しています。
フィジカル AI の始め方
フィジカル AI が貴社の業務をどのように変革できるか、探ってみませんか?Generative AI Innovation Center について、そして組織がコンセプトから本番環境対応のフィジカル AI ソリューションへと進む過程をどのように支援しているかをご確認ください。
AWS アカウントマネージャーにお問い合わせいただき、フィジカル AI ソリューションについてご相談ください。貴社のニーズに合わせた実装サポートをご利用いただけます。
このブログはソリューションアーキテクトの水野貴博が翻訳しました。
著者について
 Sri Elaprolu は AWS Generative AI Innovation Center のディレクターであり、企業・政府組織向けに最先端の AI ソリューションの実装を支援するグローバルチームを率いています。AWS での13年間の在籍期間中、NFL、Cerner、NASA などの組織と連携する機械学習サイエンスチームを率いてきました。AWS 入社以前は、Northrop Grummanで14年間、製品開発およびソフトウェアエンジニアリングのリーダーシップ職を歴任しました。Sri は工学修士号と MBA を取得しています。
Sri Elaprolu は AWS Generative AI Innovation Center のディレクターであり、企業・政府組織向けに最先端の AI ソリューションの実装を支援するグローバルチームを率いています。AWS での13年間の在籍期間中、NFL、Cerner、NASA などの組織と連携する機械学習サイエンスチームを率いてきました。AWS 入社以前は、Northrop Grummanで14年間、製品開発およびソフトウェアエンジニアリングのリーダーシップ職を歴任しました。Sri は工学修士号と MBA を取得しています。
 Alla Simoneau は 15 年以上の経験を持つ技術・ビジネス分野のリーダーであり、現在は Amazon Web Services(AWS)で新興技術部門フィジカル AI 責任者を務め、AI と実世界のアプリケーションの融合領域でグローバルなイノベーションを推進しています。Amazon に10年以上在籍する Alla は、戦略、チーム構築、オペレーショナルエクセレンスにおいて高く評価されているリーダーであり、最先端技術をスタートアップや企業顧客向けの実世界での変革へと転換することを専門としています。
Alla Simoneau は 15 年以上の経験を持つ技術・ビジネス分野のリーダーであり、現在は Amazon Web Services(AWS)で新興技術部門フィジカル AI 責任者を務め、AI と実世界のアプリケーションの融合領域でグローバルなイノベーションを推進しています。Amazon に10年以上在籍する Alla は、戦略、チーム構築、オペレーショナルエクセレンスにおいて高く評価されているリーダーであり、最先端技術をスタートアップや企業顧客向けの実世界での変革へと転換することを専門としています。
 Paul Amadeo は人工知能、機械学習、IoT システム、RF 設計、光学、半導体物理学、先進工学にまたがる 30 年以上の経験を持つベテラン技術リーダーです。AWS Generative AI Innovation Center のフィジカル AI 技術リードとして、Paul は AI 機能を具体的なフィジカルシステムに転換することを専門とし、企業顧客をコンセプトから本番環境までの複雑な実装プロセスを通じてガイドしています。彼の多様な経歴には、エッジ環境向けコンピュータビジョンシステムの設計、世界中で数十億のデバイスを生産したロボットスマートカード製造技術の設計、商業・防衛部門の両方における部門横断チームのリーダーシップが含まれます。Paul はカリフォルニア大学サンディエゴ校で応用物理学修士号、カリフォルニア工科大学で応用物理学学士号を取得し、光学システム、通信デバイス、製造技術にまたがる 6 つの特許を保有しています。
Paul Amadeo は人工知能、機械学習、IoT システム、RF 設計、光学、半導体物理学、先進工学にまたがる 30 年以上の経験を持つベテラン技術リーダーです。AWS Generative AI Innovation Center のフィジカル AI 技術リードとして、Paul は AI 機能を具体的なフィジカルシステムに転換することを専門とし、企業顧客をコンセプトから本番環境までの複雑な実装プロセスを通じてガイドしています。彼の多様な経歴には、エッジ環境向けコンピュータビジョンシステムの設計、世界中で数十億のデバイスを生産したロボットスマートカード製造技術の設計、商業・防衛部門の両方における部門横断チームのリーダーシップが含まれます。Paul はカリフォルニア大学サンディエゴ校で応用物理学修士号、カリフォルニア工科大学で応用物理学学士号を取得し、光学システム、通信デバイス、製造技術にまたがる 6 つの特許を保有しています。
 Laura Kulowski は AWS Generative AI Innovation Center のシニア応用科学者であり、顧客と協力して生成 AI ソリューションを構築しています。Amazon 入社前、Laura はハーバード大学地球惑星科学科で博士号を取得し、ジュノー探査機のデータを用いて木星の深部帯状流と磁場を研究しました。
Laura Kulowski は AWS Generative AI Innovation Center のシニア応用科学者であり、顧客と協力して生成 AI ソリューションを構築しています。Amazon 入社前、Laura はハーバード大学地球惑星科学科で博士号を取得し、ジュノー探査機のデータを用いて木星の深部帯状流と磁場を研究しました。