Amazon Web Services ブログ
Category: Robotics

「フィジカル AI 開発支援プログラム by AWS ジャパン」Community Meetup #1 を開催しました
2026 年 6 月 1 日、アマゾン ウェブ サービス ジャパン合同会社(以下、AWS ジャパン)は、「フィジカル AI 開発支援プログラム by AWS ジャパン」の第 1 回コミュニティイベント「Community Meetup #1」を、 AWS ジャパン 麻布台オフィスにて開催しました。本プログラムは 2026 年 1 月 27 日に発表し、3 月 3 日にキックオフイベントを開催しました。今回の Community Meetup は、約 6 ヶ月間の開発支援期間のなかで、採択企業同士の交流を主な目的として開いた初めてのコミュニティイベントです。
AWS Summit 展示「 AWS IoT で実現するロボット遠隔テレオペレーション体験」で Physical AI 時代のデータを生成&収集しよう!
このテレオペのデモでは AWSのIoTサービスを利用し、 WebのUIを見ながらゲームコントローラーを操作することで、クラウド経由でロボットを操作します。

AWS と NVIDIA によるフィジカル AI の加速: シミュレーションと実世界での学習による本番環境向けアプリケーションの構築
本記事は 2026/04/15 に公開された “Accelerating physical AI […]

「フィジカル AI 開発支援プログラム by AWS ジャパン」キックオフイベントを開催しました
2026 年 3 月 3 日、アマゾン ウェブ サービス ジャパン合同会社(以下、AWS ジャパン)は、「フィ […]
VAMS における NVIDIA Isaac Lab を使用した GPU アクセラレーション型ロボットシミュレーショントレーニング
オープンソースの Visual Asset Management System (VAMS) が NVIDIA Isaac Lab との統合により、ロボットアセット向けの GPU アクセラレーション強化学習に対応しました。このパイプラインでアセット管理ワークフローから直接 RL ポリシーのトレーニングと評価ができ、AWS Batch でスケーラブルな GPU コンピューティングを活用できます。
フィジカル AI: 自律型インテリジェンスに向けた次なる基盤を築く
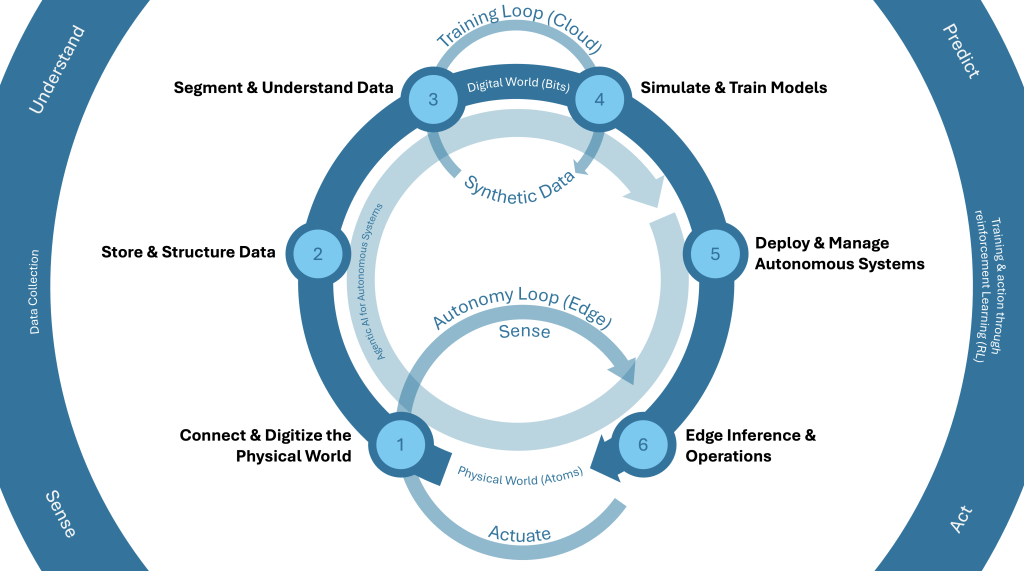
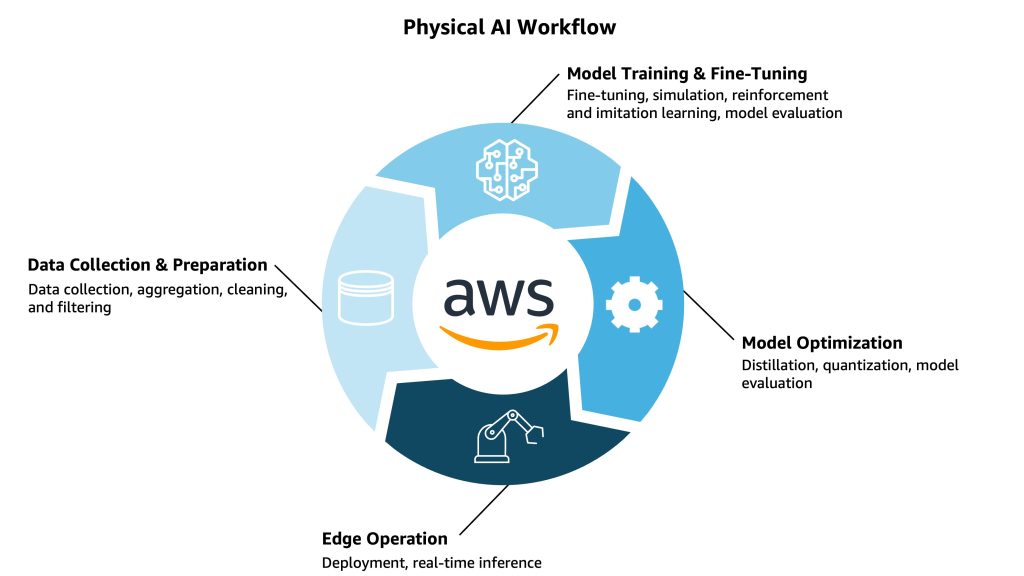
AWS の Physical AI フレームワークは、デジタル世界と物理世界を橋渡しする自律システムを構築するための包括的なアプローチです。物理世界の接続とデジタル化、データの保存と構造化、データのセグメント化と理解、シミュレーションとトレーニング、デプロイと管理、エッジ推論と運用の 6 つの相互接続された機能を通じて、継続的な学習サイクルを作り出し、自律型経済への移行を支援します。
AI による物理的な現実世界の進化 : インテリジェントな自動化の最前線
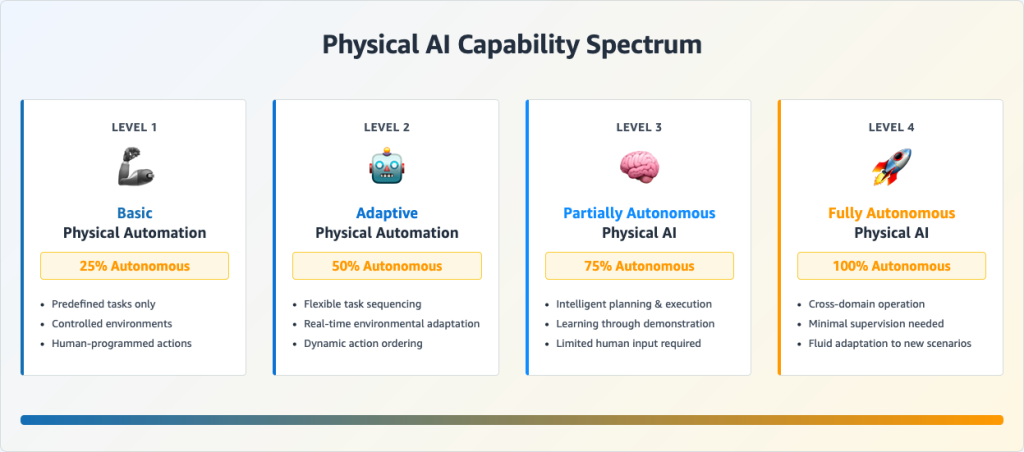
フィジカル AI においては、アルゴリズムがデジタルの境界を超え、形のある物理世界を認識し、理解し、また操作します。そのためフィジカル AI は、すべての業界の企業で、運営方針を根本的に変えるものになります。この変革を加速するため、AWS Generative AI Innovation Centerは、MassRoboticsとNVIDIAと協業し、Physical AI Fellowship を立ち上げました。これにより、次世代のロボティクスと自動化ソリューションを開発しているスタートアップが、必要なサポートを享受することが可能になり、先端を進むスタートアップとの協力ができるようになりました。
フィジカル AI の実践: 人間と機械の相互作用を支える技術基盤
本記事は 2025/11/25 に公開された “Physical AI in practice: […]
AI を具現化するブログ: パート1 AWS Batch でロボット学習を開始する
本記事は 2025/12/02 に公開された “Embodied AI Blog Series, […]
AWS Summit Japan 2025で体験!生成 AI でロボットが人間の指示を理解する未来
はじめに こんにちは!ソリューションアーキテクトの西亀真之です。今回は、AWS Summit Japan 20 […]