Amazon Web Services ブログ
AWS と NVIDIA によるフィジカル AI の加速: シミュレーションと実世界での学習による本番環境向けアプリケーションの構築
本記事は 2026/04/15 に公開された “Accelerating physical AI with AWS and NVIDIA: building production-ready applications with simulation and real-world learning” を翻訳したものです。
フィジカル AI をデジタルインテリジェンスを超えて定義する
フィジカル AI は純粋な計算システムを超えて、物理世界を直接知覚、推論、相互作用する知的エージェントへと進化しています。チャットボットやレコメンデーションエンジンなどのデジタル領域で情報を処理する従来の AI システムとは異なり、フィジカル AI はセンサーとアクチュエータを備えたシステムにインテリジェンスを組み込み、実世界の環境で意味のある、適応的な、自律的な行動を取ることを可能にします。
ロボティクスはフィジカル AI の最も高度な応用例で、機械が複雑な操作、ナビゲーション、組立作業を行います。しかし、フィジカル AI は自律車両が動的な交通状況をナビゲートする、ドローンがインフラ点検を行う、スマート製造資産(パッケージの詰まりを防ぐために速度を自律的に調整するコンベアなど)など、多様な領域に拡がります。各アプリケーションは環境条件を感知し、リアルタイムで物理データを処理する能力を共有します。また、適応的な応答を実行する能力も共通の要件です。
この新興分野は、Morgan Stanley が 2050 年までに $5 兆ドル に達すると予測する市場機会を表しています。この成長は、AI ヒューマノイドのゼロショット製造能力によって推進されています。これらのヒューマノイドは人間のように自律的かつ直感的に働き、世界の労働コストのうち 30-40% を自動化する可能性があります。しかし、これらのヒューマノイドが自己バランスなどの基本的な能力を訓練されたとしても、特定の実世界のアプリケーションにはフィジカル AI のチューニングが必要です。ロボットアームやヒューマノイドを製造業務に導入する組織は、フィジカル AI を使用して実際のビジネス問題を解決するための実用的な方法を必要としています。
開発から導入への課題
DHL Supply Chain の 最近の研究 は、倉庫にロボティクスを統合する際の実装と管理の課題を強調しています。44% の組織がすでにロボティクスを導入していますが、サプライチェーン幹部の 34% のみが、自社の技術導入が適切に機能していると考えています。これは、フィジカル AI モデルの実世界でのデプロイメント、モニタリング、配布、ガバナンスが成功したパフォーマンスとビジネス成果に不可欠であることを強化しています。 Amazon Web Services (AWS) は、Amazon の倉庫やサプライチェーン全体でフィジカル AI を備えたロボティクスを広範に導入することで、これらの分野で実証された能力を示しています。
従来のフィジカル AI 開発には、自律システムの構築に多額の資本投資が必要でした。また、試行錯誤の学習中には安全上の懸念が生じ、反復速度が制限されるという重大な障壁がありました。このプロセスは、物理学と環境ベースのシミュレーションに置き換えることができます。これにより、並列で幅広いシナリオに対してトレーニングを行うことができます。しかし、シミュレーションだけでは、摩擦の変化、材料の変形、センサーノイズ、環境の予測不可能性など、実世界の物理の完全な複雑さを捉えることはできません。
このブログでは、シミュレーションから現実へのギャップを埋める包括的なリファレンスアーキテクチャを提示します。シミュレーションベースのトレーニングの速度と安全性、および実世界の学習の忠実性を組み合わせています。AWS インフラストラクチャと NVIDIA Isaac(オープンなロボティクス開発プラットフォーム)に基づいて構築されたこのアプローチにより、組織はフィジカル AI アプリケーションの開発、デプロイメント、継続的な改善を大規模に促進することができます。
シミュレーションと実世界学習を組み合わせた二段階アプローチ
シミュレーションはスケールで迅速かつ安全な実験を可能にします。しかし、実世界のデプロイメントでは、予測不可能な物理条件を処理できるシステムが必要です。NVIDIA Isaac は、組織が物理的に正確な仮想環境でロボットポリシーを訓練およびテストし、エッジデプロイメントの成功に向けて準備することを可能にします。
NVIDIA Isaac は、NVIDIA Isaac Sim や NVIDIA Isaac Lab などのオープンモデル、ライブラリ、オープンソースフレームワークで構成されています。Isaac Sim は NVIDIA Omniverse ライブラリに基づいて構築されたオープンソースのロボティクスシミュレーションリファレンスフレームワークであり、AI 駆動ロボットのための物理的に正確な、GPU アクセラレーション対応の仮想環境を提供し、設計、テスト、合成トレーニングデータの生成を行います。NVIDIA Isaac Lab は Isaac Sim に基づいて構築されたオープンソースの統合ロボット学習フレームワークであり、強化学習や模倣学習方法を使用して高度なロボットポリシーを訓練します。
Isaac Sim は物理的に正確なシミュレーション環境を提供し、Isaac Lab はその環境を数千の並列トレーニングシナリオにスケールします。これらが一緒になって、実世界のデプロイメントの前に迅速なポリシー開発を可能にします。
シミュレーションベースのトレーニングの力
シミュレーションはフィジカル AI 開発の効率的な出発点を提供します。Isaac Sim を使用することで、チームはロボットシステムと運用環境の デジタルツイン を作成できます。これにより、複数の物理プロトタイプを構築するコストと時間を省き、迅速な実験が可能になります。AWS インフラストラクチャ上で Isaac Sim を実行することで、フィジカル AI 開発者にいくつかの重要な利点がもたらされます:
迅速な反復とコスト効率: エンジニアは高価なハードウェアを危険にさらすことなく、何千ものシナリオを並列でテストできます。複数の物理プロトタイプを構築する代わりに、チームは仮想的に設計の代替案を評価します。壊れやすい物体を把持することを学ぶロボットアームは、シミュレーションで追加コストなしで何度も失敗できます。
物理シミュレーションによる学習の拡大:シミュレーションは初期のポリシー学習に十分な物理理解を提供します。膨大な並列トレーニングが可能になり、何百もの仮想環境を同時に実行することで、物理ロボットの学習時間を数週間から数時間に圧縮します。物理パラメータがトレーニング中に体系的に変化するドメインランダム化などの技術は、モデルが実世界の条件に一般化するのを助けます。
実世界の検証の必要性
シミュレーションの利点にもかかわらず、生産準備が整ったフィジカル AI アプリケーションには実世界のデプロイメントが不可欠です。sim-to-real のギャップは、シミュレートされた物理と実際の物理の違いを表し、パフォーマンス、安全性、信頼性、運用効果に大きな影響を与える可能性があります。
物理の忠実度と環境の複雑さ:実際のセンサーは、シミュレーションでは近似しきれない微妙な違いを捉えます。表面のテクスチャの変化、照明条件、材料のコンプライアンス、動的な環境要因などが含まれます。また、生産環境では予測不可能なシナリオが発生します。
継続的な改善:システムが生産で動作するにつれて、モデルの改良に情報を提供する新しい状況に遭遇します。運用データは、モデルの改善を導くエッジケースとパフォーマンスギャップを明らかにします。包括的なセンサーフィードバック(力センサー、ジョイントエンコーダ、カメラ、加速度計)を備えた実世界のテストは、モデルの有効性を検証します。ミリ秒のデータストリーミングにより、継続的なパフォーマンスモニタリングが可能になります。
エンドツーエンドアーキテクチャの概要
以下のアーキテクチャガイダンスは、シミュレーションベースと実世界の強化学習の 2 つの補完的な経路を通じて、フィジカル AI ロボティクスアプリケーションの開発を可能にします。このソリューションは、NVIDIA Isaac または力、視覚、位置、動作センサーなどの実世界のインテリジェントセンサーデータを通じて物理を管理します。シミュレーションパスでは、実世界の実装前に仮想環境でモデルをトレーニングします。一方、実世界パスでは、センサーデータを通じて実際の物理的相互作用をキャプチャします。トレーニングされたモデルは、エッジデバイスにデプロイされ、推論ベースの制御ポリシーを実装し、反復学習のためにリアルタイムのセンサーデータを摂取します。これにより、人間のような知性を模倣し、指定されたタスクを自律的に実行するシステムが可能になります。
この リファレンスアーキテクチャ には、並行して動作する 2 つの補完的な学習ループが実装されています。
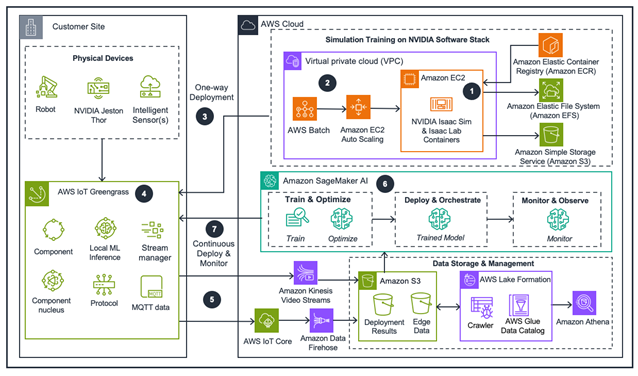
図 1: このガイダンスアーキテクチャは、AWS 上で高度な AI 機能を物理ロボティクスシステムと統合する方法を示しており、実世界の環境で自律的な操作を可能にします
シミュレーショントレーニングループ – 構築と学習
- GPU 搭載の Amazon Elastic Compute Cloud (Amazon EC2) インスタンス上でコンテナで実行される Isaac Sim から始まります。エンジニアはシステムの運動学をモデル化し、物理制約を定義し、運用シナリオを表す仮想環境を作成します。Isaac Lab は、物理パラメータ、環境条件、タスクの複雑さのバリエーションをテストしながら、トレーニングを複数の並列シナリオにわたってスケールします。
- AWS Batch はシミュレーションワークロードを調整し、Amazon EC2 自動スケーリング グループで GPU コンピューティングリソースを動的にプロビジョニングします。トレーニングの需要が変動するにつれて、インフラストラクチャは自動的にスケールし、集中的なフェーズでは追加のインスタンスを起動し、アイドル期間中はスケールダウンして、コスト効率を最適化します。トレーニングされたモデルと関連するポリシーは、Amazon Simple Storage Service (Amazon S3) に保存されます。Amazon S3 は耐久性のあるバージョン管理されたストレージを提供します。 Amazon Elastic Container Registry (Amazon ECR) は、環境間での一貫したデプロイメントのためにコンテナイメージを管理します。
実世界の学習ループ – デプロイと監視
- シミュレーショントレーニングで候補モデルが生成されると、エンジニアはそれを AWS IoT Greengrass が実行されているエッジインフラストラクチャにデプロイします。NVIDIA Jetson Thor などの物理ロボットコントローラーでリアルタイムの推論を行います。これらのエッジデバイスは二重の目的を果たし、リアルタイム制御のための ML 推論を実行し、包括的なセンサーデータを収集します。
- AWS IoT Greengrass コンポーネントは複数のセンサータイプからのリアルタイムフィードバックを処理します。
- マルチモーダルデータは 2 つの経路で処理されます。時系列テレメトリを含む MQTT メッセージ形式の構造化センサーデータは、AWS IoT Core と Amazon Data Firehose を経由して Amazon S3 データレイクに送られます。カメラからのビデオストリームは Amazon Kinesis Video Streams を介してキャプチャされます。 AWS Glue クローラーは運用データをカタログ化し、Amazon Athena を通じてクエリ可能にし、AWS Lake Formation を介して管理可能にします。
- Amazon SageMaker AI は、実世界の運用データのバッチを処理してモデルを再トレーニングおよび最適化し、sim-to-real へのギャップを明示的に埋めます。
- 洗練されたモデルは AWS IoT Greengrass を介してエッジデバイスにデプロイされ、動作が改善されます。モニタリングレイヤーはパフォーマンスメトリクスを継続的に追跡し、モデルドリフトを検出します。パフォーマンスが低下すると、再トレーニングワークフローがトリガーされます。これにより、システムが運用データを生成し、モデルが実世界のパフォーマンスに基づいて洗練され、改善されたモデルが再デプロイされ、サイクルが繰り返される継続的な改善が実現します。
組み立て製造における実世界のアプリケーション
電子機器製造、自動車組立、精密工学で必要とされる、歯車部品を厳密な公差で挿入するような接触が豊富な操作タスクを含む一般的な産業の課題を考えてみましょう。これらのタスクには、リアルタイムで接触力に応答する高度な制御戦略が必要です。 Universal Robots (UR) は、Isaac ライブラリの統合を通じてこの機能を示しています。彼らのロボットアームは、適応的な力フィードバックと制御戦略を使用して、穴にペグをミクロンレベルの精度で挿入します。
シミュレーションフェーズ: シミュレーションフェーズでは、エンジニアは Isaac Sim で UR ロボットアーム、ワークピースの形状、組立フィクスチャをモデル化します。また、材料特性、摩擦係数、接触力学を含む物理パラメータを定義します。Isaac Lab で強化学習を使用して、システムはドメインランダム化、挿入角度、初期位置、摩擦パラメータ、部品公差の変化を含む何千ものシナリオでトレーニングします。これにより、力制御挿入の初期ポリシーが開発され、ロボットが接触を感知し、アプローチ角度を調整し、適切な力を適用するように教えます。
導入と改良: 導入と改良では、トレーニングされたポリシーモデルは、ロボットコントローラー上の AWS IoT Greengrass を介してデプロイされます。生産テスト中、力センサー、ジョイントエンコーダ、位置センサーは AWS にリアルタイムデータをストリームします。これにより、sim-to-real へのギャップが明らかになります。例えば、実際の摩擦がシミュレーション値を超えたり、実際の部品公差がモデル化された値よりも大きく変化したりします。
Amazon SageMaker は運用データを処理します。そして、実世界の物理を考慮したモデルを再トレーニングします。エンジニアは挿入の失敗が特定の力プロファイルと相関していることを発見し、ターゲットを絞った改善を可能にします。洗練されたモデルはエッジに再デプロイされ、成功率を向上させます。この反復プロセスは、ロボットが新しいバリエーションに遭遇するにつれて継続します。モニタリングシステムは主要なパフォーマンス指標を追跡し、メトリクスが許容範囲外にドリフトしたときに再トレーニングをトリガーします。
図 2: ロボットアームギアアセンブリ
デュアルパスアーキテクチャは多様なフィジカル AI アプリケーションに適用されます。組織は医薬品取り扱いのための器用な操作システム、動的な倉庫ナビゲーションのためのモバイルロボット、物流施設の人型ロボットの開発時にこれらの原則を適用できます。
成功のためのベストプラクティス
堅牢なシミュレーションから始める: 実際のプロトタイプに基づいた物理モデルの定義に投資することが重要です。ユーザーは、強化学習のための適切な報酬関数を開発します。シミュレーションループ内で物理パラメータを反復的に調整し、プロトタイプで精度を検証することで、最良の結果が得られます。実世界へのデプロイメントの前にドメインランダム化を適用することも、堅牢なトレーニング結果をサポートする別の方法です。複数のシミュレーション反復は、物理テストよりもはるかに安価です。
段階的にデプロイする: 完全な生産の前に、制御された環境で実世界のテストを開始します。初期データでシミュレーションの仮定を検証し、重要なギャップを特定します。
包括的に計装する: 多様なセンサーをデプロイしてマルチモーダルデータをキャプチャし、物理的な検証を行います。より豊かな実世界のフィードバックにより、より効果的なモデル改良と自動再トレーニングトリガーによる継続的なモニタリングが可能になります。
シミュレーション-リアルのパリティを維持する: 実世界のデータが物理の洞察を明らかにするにつれて、シミュレーションモデルを更新して将来のトレーニングを改善します。これにより、各ドメインが他方を情報提供する美徳のサイクルを生成します。
フィジカル AI の実務への展開
ロボティクスやその他の自律システムにおける物理 AI は、研究環境から生産使用に移行しました。このリファレンスアーキテクチャは、組織が製造、物流、ヘルスケアなどを超えて実際のビジネス問題を解決する自律システムを開発するための実用的でスケーラブルな道筋を提供します。
シミュレーションベースのトレーニングの速度と安全性を実世界の学習の忠実度と組み合わせることで、組織は開発サイクルを加速し、コストを削減できます。また、運用経験を通じて継続的に改善するシステムをデプロイできます。シミュレーション優先と実世界優先の両アプローチに対応するアーキテクチャの柔軟性は、多様なユースケースと組織の準備レベルに対応します。
フィジカル AI の採用が加速するにつれて、シミュレーションと現実を効果的に橋渡しし、それぞれの強みを使用してアプリケーションを構築する組織が成功するでしょう。AWS のスケーラブルなインフラストラクチャと NVIDIA の物理シミュレーションプラットフォームにより、その未来は今日利用可能です。
始める準備はできましたか? AWS Guidance for Physical AI for Robotics でリファレンスアーキテクチャにアクセスしてください。追加リソースについては、以下をご覧ください。物理ベースの仮想環境でのシミュレーション、テスト、合成データ生成のための NVIDIA Isaac Sim ドキュメント、エッジデプロイメントのための AWS IoT Greengrass ドキュメント、モデル開発と継続的な改良のための Amazon SageMaker AI ドキュメント、および GPU アクセラレーテッドコンピュートのための AWS Batch ドキュメントがあります。