Amazon Web Services ブログ
Physical AI — AI エージェントが現実世界で「見て、考えて、動かす」自律オペレーションの実現
本ブログでは、AWS Summit Japan 2026(2026年6月25日〜26日、幕張メッセ)の Physical AI ブースで展示するデモを題材に、AWS のクラウドサービスと産業用ロボットを組み合わせた自律オペレーションの実現方法をご紹介します。
はじめに
Physical AI とは、ハードウェアを通じて物理世界を知覚し、ソフトウェア側で理解・推論・学習を行い、再びハードウェアを通じて物理世界に働きかける技術です。テキストの内容を返すデジタル AI とは異なり、ロボットやヒューマノイド、AGV といったハードウェアを通じて、物理的なアクションを自律的に実行します。AI とロボティクスの双方が同時に進化しブレークスルーを迎えた今、製造・物流・インフラ管理など、あらゆる産業の現場オペレーションが変革されようとしています。
従来の産業用ロボットは事前にすべての動作をプログラミングする必要があり、予期せぬ状況や形状が変化する対象物には対応できないという壁がありました。Physical AI は状況を自ら判断し、不確実性の高い環境にも適応できます。ここに、AI エージェントが自律的に「調査し、判断し、実行する」能力が加わることで、真に自律的なオペレーションが可能になります。
Physical AI とは — Agentic AI が現実世界に出るとき
本デモにおける Physical AI の中核 — Agentic AI
本デモにおける Physical AI の中核は、AI エージェント(Agentic AI)です。ソフトウェアの世界で発展してきたエージェントの能力 — ツール呼び出し、メモリへの学習蓄積、計画立案と実行 — を、カメラやセンサーによる「知覚」とロボットアームや自律走行車両による「行動」へと拡張し、知覚 → 判断 → 行動のループを自律的に回します。
なぜ今 Physical AI なのか
Physical AI が注目される背景には、いくつかの技術的ブレークスルーがあります。
- LLM の推論能力の飛躍的向上 — 複雑な状況判断や計画立案が可能に
- Agentic AI フレームワークの成熟 — ツール呼び出し、メモリ管理、マルチエージェント協調が実用レベルに
- クラウド-エッジ連携の高度化 — 低遅延通信と安全な制御の両立
- 協働ロボットの普及 — 人と同じ空間で安全に動作するロボットが入手可能に
これらが揃った今、AI エージェントが現実世界で自律的にオペレーションを遂行する時代が到来しています。
デモコンセプト — 「知らない状態」から自律的に解決する
概要
現実世界とつながった AI エージェントが、想定外の障害に対して自ら調査し、自ら考え、ロボットを動かして解決する。

私たちが構築したデモは、空想の街に Amazon のラストワンマイル配送を模した配送網を作り、来場者が自由に障害を仕掛けることで、AI エージェントの自律的な問題解決能力を体験してもらうものです。
重要なのは、これが事前にプログラムされたシナリオではないという点です。来場者が自由に障害物を配置するため、毎回異なる状況が発生します。AI エージェントは障害の存在も位置もあらかじめ知らない「ゼロ」の状態から、調査・判断・実行を自律的に回していきます。
来場者体験の設計
来場者の目の前には2つの画面が並びます。
| 画面 | 内容 |
|---|---|
| AI エージェントの思考 | AI エージェントがいま何を考え、次に何をしようとしているかをリアルタイム表示 |
| AI が認識している世界 | AI エージェントが現時点で認識している世界。調査が進むにつれて実際の状態に近づく |
この2つを見比べることで、AI がまだ何を知らず、いま何を考え、どう行動しようとしているかが一目でわかります。リアルタイムダッシュボードではエージェントの調査計画・復旧方針が逐次可視化されます。
デモフロー — 5ステップの自律オペレーション
デモは1サイクル約3〜4分で、以下の5ステップで進行します。
Step 1: 通常配送(デモの起点)
空想の街で、配達車両(TurtleBot)が物流・倉庫エリアから配送先へルートを巡回しています。配送網は正常に動いており、来場者にはまずこの「通常状態」を見てもらいます。
Step 2: 来場者が障害を発生させる
来場者が配送ルート上に障害物を配置すると、配達車両が障害物を検知して停止し、配送が止まります。障害の場所は来場者が自由に決めるため、毎回パターンが異なります。
Step 3: AI エージェントが調査を開始する
配送停止を検知した AI エージェントが、障害の特定に動き出します。FANUC CRX-20iA/L 協働ロボットのアーム先端カメラ(FRAMOS D435e)でトラブルが起きた通りを探索し、段階的にデータを収集します。
以下のループで段階的に進みます。
- 周辺調査 — トラブルが起きた通りをカメラで撮影する
- 認識の更新 — 得られたデータをもとに AI が自分の地図を更新する
- 次の調査計画 — 追加で調べるべき箇所があるかを判断する
一発で全容がわかるわけではなく、このループを繰り返しながら障害を見極めます。
Step 4: 復旧の実行
障害物を特定した AI エージェントが、FANUC ロボットに除去を指示します。ロボットが障害物を把持し、ステージ上の回収エリアへ移動させることで道路を開通させます。把持できない障害物を発見した場合は、オペレーターに支援を要請します。

Step 5: 配送再開
復旧が完了すると、AI エージェントは配達車両に配送再開の指示を出します。来場者が止めた配送網が、目の前で復旧されます。
システムアーキテクチャ
設計原則
本システムは以下の原則に基づいて設計されています。
- 知性が必要な処理はクラウドで実行 — 物体認識、コンテキスト判断、アーム制御指示、車両の再開指示は LLM の推論力を活かしクラウドから発行
- 物理的な動作実行はエッジで処理 — クラウドからの指示を受けたモーションプランニング(MoveIt 2)やセンサー処理はエッジ PC 上で実行
- 通信断に耐える設計 — クラウドとの通信が切れた場合、アームは安全停止し、復旧後にクラウドから再開指示を受ける
全体構成
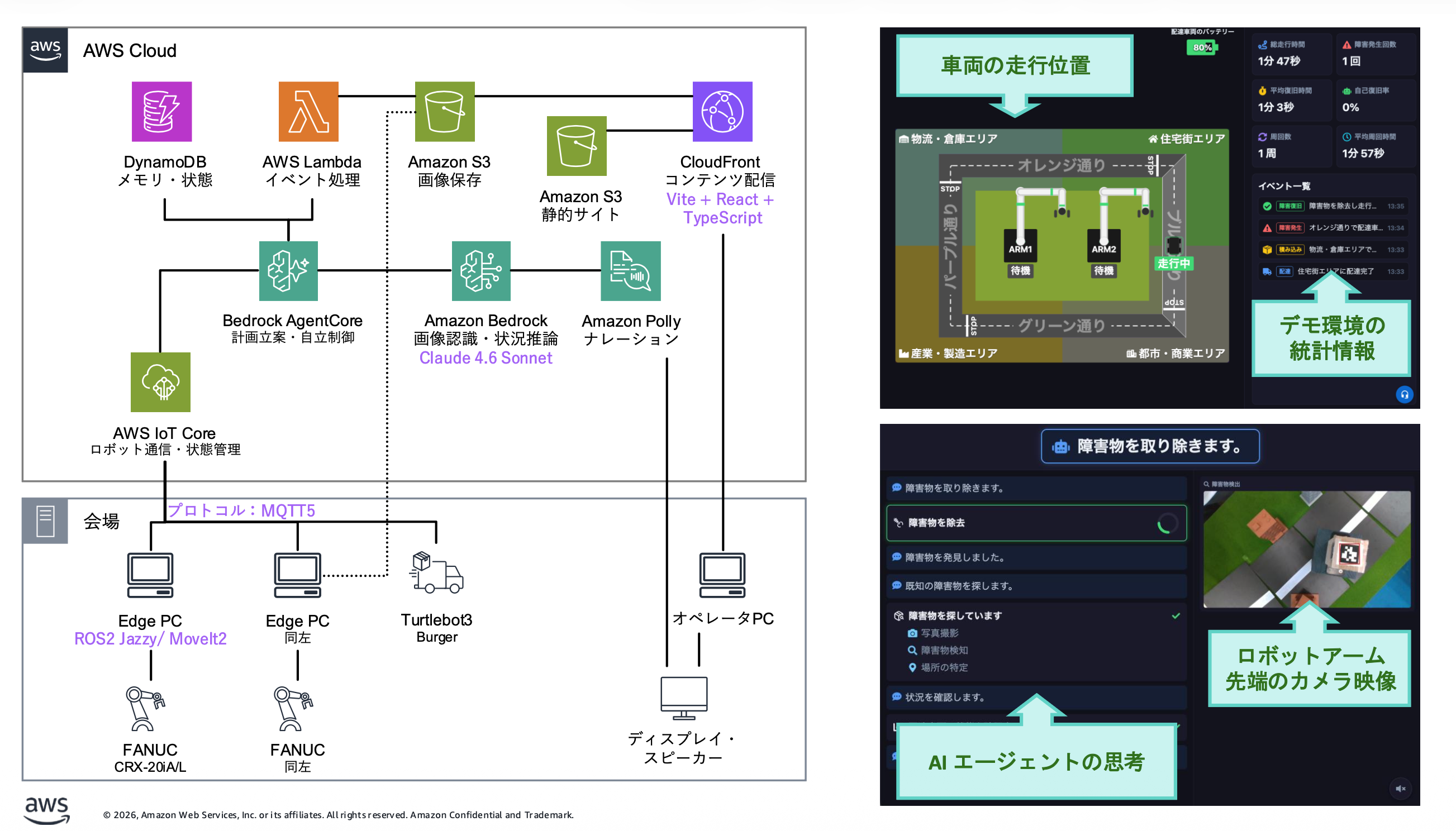
▲ 知性が必要な処理はクラウド(Amazon Bedrock AgentCore / Amazon Bedrock / Amazon Polly)で実行し、物理的な動作実行はエッジ(ROS 2 / MoveIt 2)で処理。AWS IoT Core がクラウドとエッジをセキュアに接続します。
通信方式
| 通信経路 | プロトコル | 理由 |
|---|---|---|
| FANUC ロボット ↔ AI エージェント | AWS IoT Core(MQTT 5)Request/Response | 低遅延・双方向制御。TLS 相互認証による安全性 |
| 配達車両 ↔ クラウド | AWS IoT Core(Device Shadow) | Named Shadow で走行状態・停止/再開・バッテリー・温度などを管理 |
| ダッシュボード UI ↔ クラウド | AWS IoT Core(MQTT 5)+ HTTPS | エージェントの思考過程をリアルタイムに配信 |
使用する AWS サービス
Amazon Bedrock AgentCore Runtime — AI エージェントの実行基盤
Amazon Bedrock AgentCore は、AI エージェントをインフラ管理不要でデプロイ・運用できるマネージドサービスです。本デモでは、AgentCore Runtime 上で動作する AI エージェントが、推論モデルに Amazon Bedrock の Claude Sonnet 4.6 を使用し、ツール呼び出し(ロボット制御 API)、メモリ(調査結果の蓄積)、データ(地図情報)を統合的に管理して、調査計画の立案から復旧指示までを自律的に遂行します。
Amazon Bedrock(Claude 4.5 Haiku)— 視覚認識と推論
Amazon Bedrock 上の Claude 4.5 Haiku が、D435e カメラから取得した画像をもとに周囲の状況を認識します。障害物の有無や周囲の状況を考慮した最適な行動の推論を担当します。
AWS IoT Core — エッジとクラウドの架け橋
AWS IoT Core が、会場内のロボットとクラウド上の AI エージェントをセキュアに接続します。MQTT 5 の Request/Response パターンによるアーム制御と、Device Shadow による配達車両の状態管理を実現します。通信断が発生しても最後の既知状態から安全に復帰できます。
Amazon Polly — AI の声
Amazon Polly により、AI エージェントの判断内容を音声で来場者に伝えます。「状況を確認します」「障害物を探します」「障害物を発見しました」「障害物を取り除きます」といったナレーションがデモの臨場感を高めます。
ハードウェア構成
FANUC CRX-20iA/L 協働ロボット × 2台
FANUC CRX-20iA/L は、可搬質量 20kg、リーチ 1,418mm の協働ロボットです。人と同じ空間で安全に動作します。
| 項目 | 仕様 |
|---|---|
| リーチ | 1,418 mm |
| 制御装置 | R-30iB Mini Plus |
| 安全機能 | 接触検知による即時停止 |
| ロボットハンド | OnRobot 2FG7(ストローク 最大 68mm) |
| カメラ | FRAMOS D435e(RGB + Depth) |
2台の CRX はそれぞれ担当エリアを持ち、AI エージェントの指示のもとで協調動作します。調査時はアーム先端の FRAMOS D435e カメラで隣接エリアを撮影し、復旧時はロボットハンド(OnRobot 2FG7)で障害物を把持して回収エリアへ移動します。
TurtleBot3 Burger — 配達車両
配送網を走行する自律走行ロボットです。
| 項目 | 仕様 |
|---|---|
| 経路追従 | 赤外線ラインセンサー(TCRT5000 × 3ch)によるライントレース |
| 区間認識 | 停止ライン検知(3センサー同時白)による区間識別 |
| 障害物検知 | 赤外線距離センサー(IRSS-10)による前方障害物検知 |
| 通信 | AWS IoT Core Named Shadow(mTLS)+ MQTT ログ送信 |
障害物を検知して停止すると、その情報がクラウド側のエージェントに伝達され、調査フローが起動します。復旧完了後、エージェントからの再開指示で走行を再開します。
ジオラマステージ
3,640mm × 3,640mm の木工ステージ上に、3D プリンタで製作したミニチュアの街を配置します。周回トラックには「オレンジ通り」「ブルー通り」「グリーン通り」「パープル通り」の4つの通りがあり、配達車両の走行ルートとしています。
道路は黒地マット仕上げの上に白線(幅 30mm)を敷設し、配達車両がライントレースで追従します。配送・積荷のポイントには配達車両のための停止線を配置しています。
AI エージェントの意思決定 — 調査し、学習し、適応する
1ターン = 1アクション
AI エージェントは毎ターン、以下のアクションから1つを選択して実行します。
| アクション | 内容 |
|---|---|
| 調査 | FANUC ロボットの FRAMOS D435e カメラで対象エリアを調査 |
| 障害物除去 | FANUC ロボットで障害物を把持し、回収エリアへ移動 |
エージェントは MAP の構造(道路レイアウト)とスタート/ゴール位置は既知ですが、障害物の位置は一切知りません。
調査の選択
調査を行うかどうかは、AI エージェントが自律的に判断します。配達車両が障害物を検知した後、AI エージェントは FANUC ロボットのカメラで状況を確認し、把持可能な障害物かどうかを見極めてから行動を計画します。これは事前にプログラムされた手順ではなく、状況に応じた AI エージェントによる自律的な判断です。
障害物除去戦略の判断
障害物を発見した AI エージェントは、カメラ画像から障害物の形状・サイズを認識し、ロボットハンドで把持可能かを判断します。把持可能と判断すれば、ロボットに除去を指示し道路を開通させます。把持が困難と判断した場合は、オペレーターに支援を要請します。
まとめ
本ブログでは、AWS Summit Japan 2026 の Physical AI ブースで展示するデモを通じて、AI エージェントが現実世界で自律的にオペレーションを遂行する仕組みをご紹介しました。
このデモのポイントは以下の通りです。
- 想定外への対応力 — 事前に定義されたシナリオではなく、予測不能な状況に AI が自律的に対応する
- 調査から解決まで一気通貫 — 障害の検知・調査・判断・復旧までを AI エージェントが自律的に完走する
- リアルタイム可視化 — ダッシュボードにより、エージェントの思考と行動が常に可視化される
- クラウド AI × ロボットの協調 — クラウド上の AI エージェントが判断し、現場のロボットが実行する新しいオペレーションモデル
Physical AI は、AI が「考える」だけでなく「行動する」時代の到来を示しています。AWS のクラウドサービスとロボティクスの組み合わせにより、この未来は今まさに実現可能になっています。
体験機会のご案内
Physical AI デモの実物は、AWS Summit Japan 2026(2026年6月25日〜26日、幕張メッセ)の Physical AI ブースでご覧いただけます。AI エージェントが現実世界で自律的に問題を解決する様子を、ぜひ目の前で体験してください。
AWS を活用した Physical AI ソリューションにご興味のある方は、ぜひお問い合わせください。
このブログは AWS Japan のソリューションアーキテクト 西田 光彦 、水野 貴博 が執筆しました。

