Amazon Web Services ブログ
AWS Summit 展示「 AWS IoT で実現するロボット遠隔テレオペレーション体験」で Physical AI 時代のデータを生成&収集しよう!
こんにちは!製造業のお客様を中心に技術支援をしているソリューションアーキテクトの伊藤ジャッジです。だんだん梅雨らしい気候になってきましたね。この時期といえば今年も AWS Summit Japan 2026 です!今年も IoT の展示の出展はもりだくさんで、こちらのブログに概要を掲載しています。ぜひ遊びに来てください。このブログでは IoT 展示内の ロボットの遠隔テレオペレーションの ブースの展示について紹介します。
背景
2026 年のものづくり白書には、政府主導の AI ロボティクス戦略がその中にありました。AI で賢くなったロボットが、これまで自動化が難しかった市場を広げる「フィジカル AI 時代」を見据えた戦略の発表となりました。政府主導のロボティクス推進方針が明確になったことはロボットを製造する側にも使う側にも喜ばしいことですが、一方で、AI の学習に必要なデータがなければ、どんなに性能の良いロボットでも、AI を使って期待した動作をしてもらうことができません。また、学習には高品質なデータが必要となります。幸いなことに日本の産業ロボットの製造業における活用は世界でも最高水準です。そのため、産業ロボットの動作データは潤沢に存在します。政府も日本の強みとして、産業用ロボット、部品・素材、高品質な現場データを土台に、「まず社会実装してデータを取り、モデルを改善し、他分野へ横展開」という循環を確立することを勝ち筋として、上述のものづくり白書で提案しています。
データが必要ということは理解できますが、このデータ収集において大きな壁があります。実は、ロボット開発では、センサー・モーター・カメラなど多数のハードウェアを組み合わせる必要があります。しかし今までは、ロボットメーカーごとにインターフェースが異なり、各社それぞれのロボット制御言語を使用してきました。そのため、ロボットを新規導入する際は、あるロボット向けに書いたソフトを別機種に移植することはできず、一から動作、通信制御、またはデータ連携を作り込むことになり、膨大な開発コストがかかっていました。この状態は各種ロボットが連携する将来を見据えたロボットの動作データの収集という観点では、障壁と言えるでしょう。
このサイロ化したロボット開発環境の問題を解決するため、ROS が登場しました。ROS(Robot Operating System)は、上記の課題を解決するオープンソースの共通フレームワークです。標準化された通信の仕組みとツール群を提供し、開発者はハードウェアの違いを意識せずにロボットの機能開発に集中できます。さらに、ROS2 の登場をきっかけに近年では産業用ロボットメーカーも ROS2 のサポートを発表する機会が増えてきました。
デモの内容
デモのタイトルにある「遠隔テレオペレーション」(テレオペ)とは、離れた場所にあるロボットや機械を、人間がリアルタイムに操作する技術です。オペレーターは手元のコントローラーやモニター映像を通じて現場の状況を把握し、ロボットに動作指示を送ります。ロボット側のカメラやセンサーの情報がネットワーク経由でオペレーターに返されることで、あたかも現場にいるかのように作業できます。この技術により危険な環境(災害現場、高所、有害物質のある場所)や、人がすぐに行けない遠隔地での作業を安全に行えています。
このテレオペのデモでは AWS の IoT サービスを利用し、 Web の UI を見ながらゲームコントローラーを操作することで、クラウド経由でロボットを操作します。
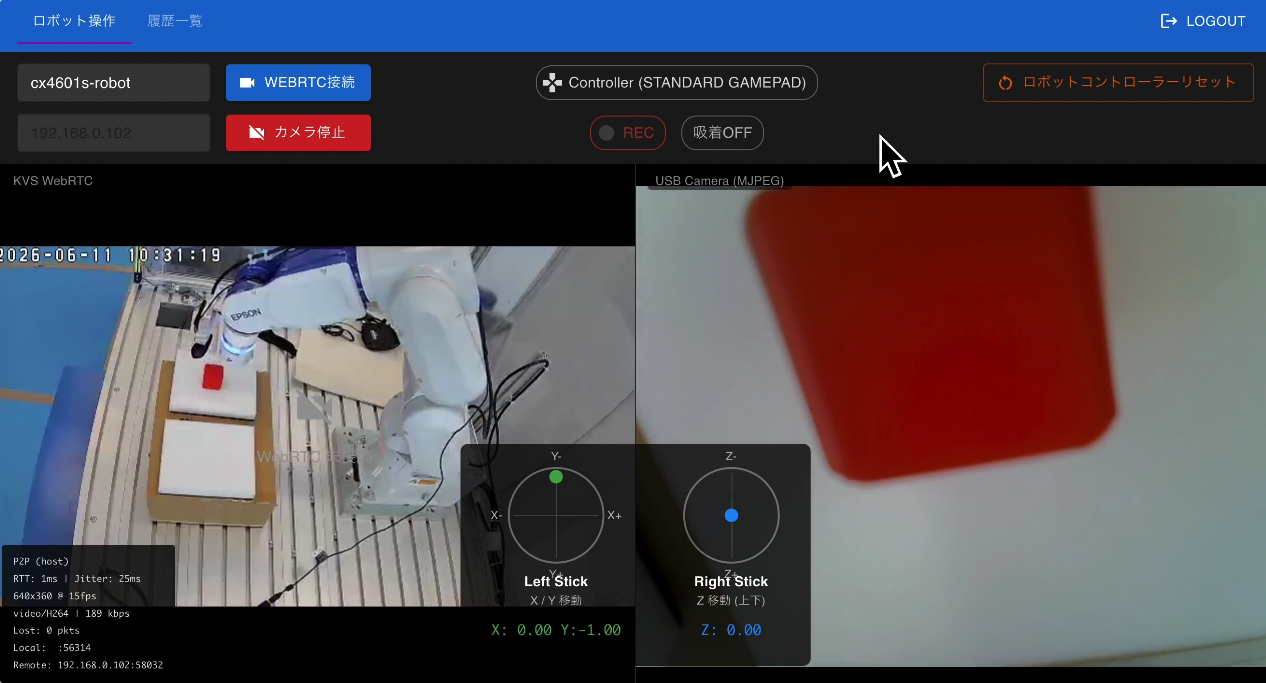
このデモで利用している実機のロボットは、世界中の生産現場でも利用されているセイコーエプソン株式会社製の高速・高精度な垂直多関節(6軸)ロボット(CX4-A601S)を利用しています。セイコーエプソン株式会社では自社のロボットに対応した ROS2 パッケージを公開しており、デモでは ROS2 経由で操作しています。
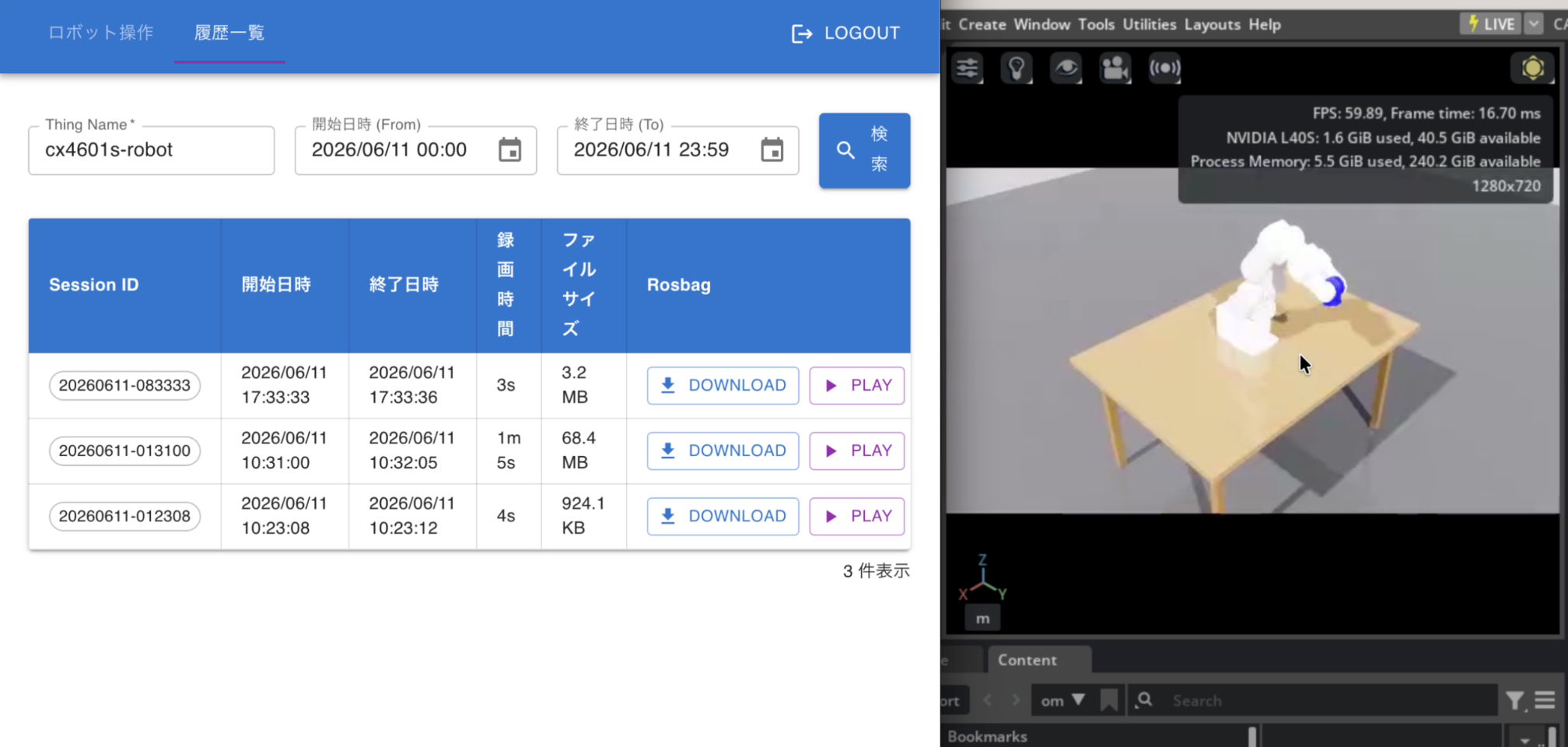
このデモでは同時にデジタルツインとしての Amazon EC2 上で実行されている NVIDIA Isaac SIM にも情報が送られるため、カメラの映像だけではなく、シミュレーション環境上でもロボットの動作を確認することができます。
セイコーエプソン株式会社の ROS2 パッケージ では実機を利用せず、Rviz (3D 可視化ツール)で動かすモードも用意されているため、シミュレーション環境の中だけで動かすこともできます。それゆえ、ロボットの操作に不慣れな人でも安心して操作することが可能です。
このデモでは操作時のデータを rosbag 形式 (ROS2 上でやり取りされるメッセージを記録し、後で利用できる) に保存することも可能で、作成された rosbag は記録後にクラウドに保存されます。このデータを使うことで、クラウド上のシミュレーション環境で、同じ様に再現することもできます。また、保存された操作データは、Physical AI で利用される VLA(Vision-Language-Action)モデルの模倣学習データとして活用することができます。
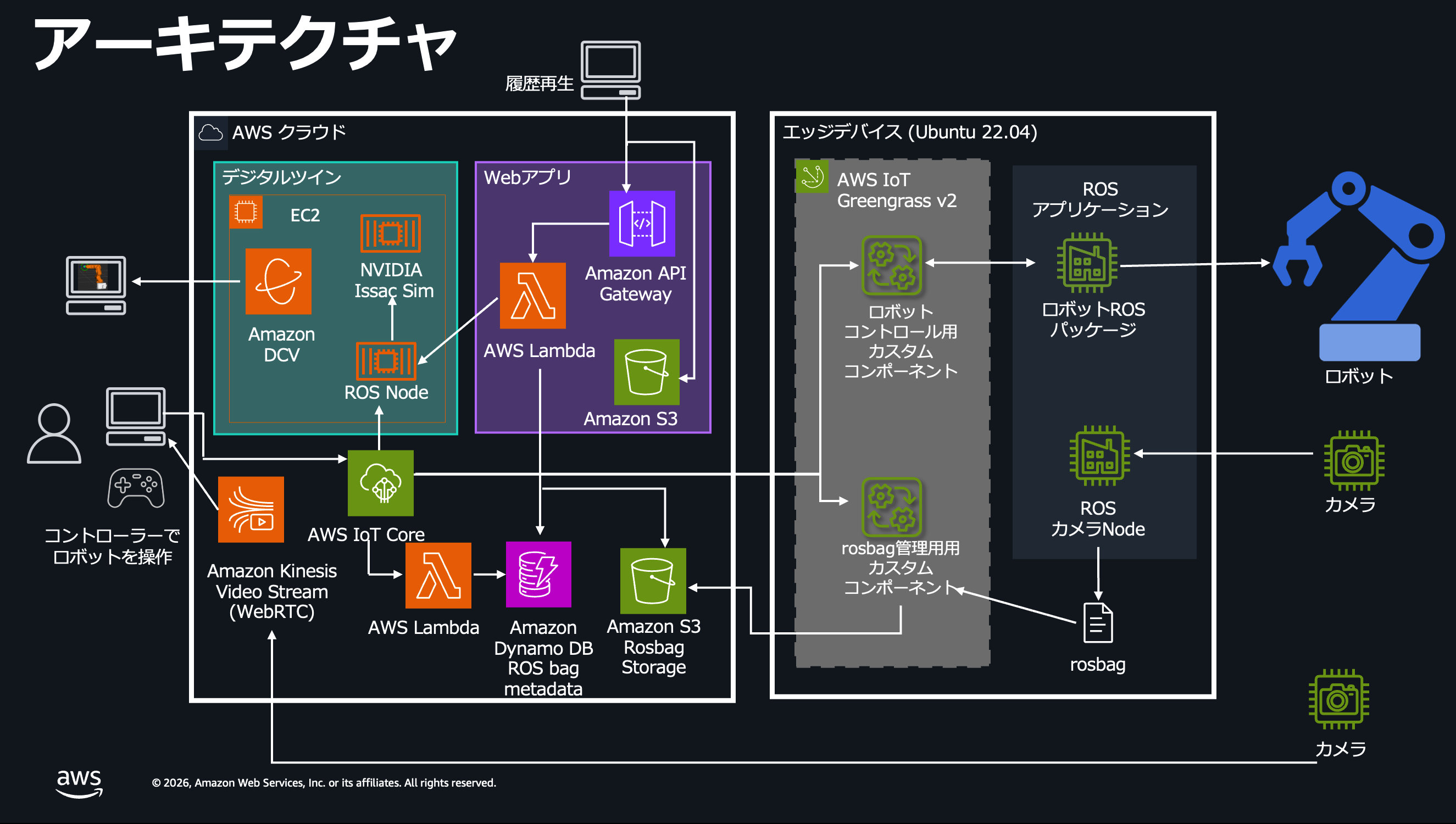
今回のデモの全体の構成は下記となっています。
ぜひ、6 月 25 日、26 日に幕張メッセで開催される AWS Summit に来場いただき、実際にご自身の手でコントローラーを操作し、Physical AI の時代に必須となるロボット動作データ生成と収集を体験しに来てください!
デモは AWS Expo の AWS for Industries Zone に展示しています。
伊藤ジャッジ向子 (Ito, Judge Sakiko)
米国での開発者経験を経て、AWSのサポートに入社し、異動しエンタープライズ事業本部でソリューションアーキテクトとして製造業のお客様をご支援しています。趣味は山登り、クラッシックバレエと愛犬のお世話です。

Muhammad Fikko Fadjrimiratno(ふぃっこ)
アマゾン ウェブ サービス ジャパン合同会社 ソリューションアーキテクト
不動産・建設業界のお客様を中心に、AWS 利用をご支援しているソリューションアーキテクトです。好きな領域はロボットとIoTと機械学習であり、最近はロボット分野での生成AIの活用にチャレンジしています。趣味はフライトシミュレーター、冬はスノーボードです。

市川 純
プロトタイピングソリューションアーキテクト
AWS では IoT に関連するプロトタイピングを支援する、ソリューション アーキテクトとして、お客様の IoT 関連案件を支援しています。