Artificial Intelligence
Introducing Amazon SageMaker Reinforcement Learning Components for open-source Kubeflow pipelines
This blog post was co-authored by AWS and Max Kelsen. Max Kelsen is one of Australia’s leading Artificial Intelligence (AI) and Machine Learning (ML) solutions businesses. The company delivers innovation, directly linked to the generation of business value and competitive advantage to customers in Australia and globally, including Fortune 500 companies. Max Kelsen is also dedicated to reinvesting our expertise and profits to solve the challenges of humankind, focusing on Genomics, AI Safety, and Quantum Computing.
Robots require the integration of technologies such as image recognition, sensing, artificial intelligence, machine learning (ML), and reinforcement learning (RL) in ways that are new to the field of robotics. Today, we’re launching Amazon SageMaker Reinforcement Learning Kubeflow Components supporting AWS RoboMaker, a cloud robotics service, for orchestrating robotics ML workflows. Orchestrating robotics operations to train, simulate, and deploy RL applications is difficult and time-consuming. Now, with SageMaker RL components and pipelines, it’s faster to experiment and manage robotics ML workflows from perception to controls and optimization, and create end-to-end solutions without having to rebuild each time.
Robots are being used more widely in society for purposes that are increasing in sophistication, such as complex assembly, picking and packing, last-mile delivery, environmental monitoring, search and rescue, and assisted surgery. Robotics often involves training complex sequences of behaviors. RL is an emerging ML technique that can help develop solutions for exactly these kinds of problems. It learns complex behaviors without requiring any labeled training data, and can make short-term decisions while optimizing for a long-term goal. For example, when a robot interacts with its environment, this mostly takes place in a simulator. The robot receives a positive or negative reward for actions that it takes. Rewards are computed by a user-defined function that outputs a numeric representation of the actions that should be incentivized. The agent tries to maximize positive rewards, and as a result the model learns an optimal strategy for decision-making.
SageMaker and AWS RoboMaker are two different services streamlined to serve two separate personas: data scientists and roboticists, respectively. SageMaker is a fully managed service that provides every developer and data scientist with the ability to build, train, and deploy ML models quickly. SageMaker RL builds on top of SageMaker, adding pre-packaged RL toolkits and making it easy to integrate any simulation environment. AWS RoboMaker is the most complete cloud solution for robotic developers to simulate, test, and securely deploy robotic applications at scale. Its managed Robot Operating System (ROS) (https://www.ros.org/) and Gazebo (http://gazebosim.org/), an open-source robot simulation software, stacks free up engineering resources and enable you to start building quickly. The task of stitching together machine learning workflows for robotics using Amazon SageMaker and AWS RoboMaker is non-trivial, consuming valuable time for both data scientists and roboticists.
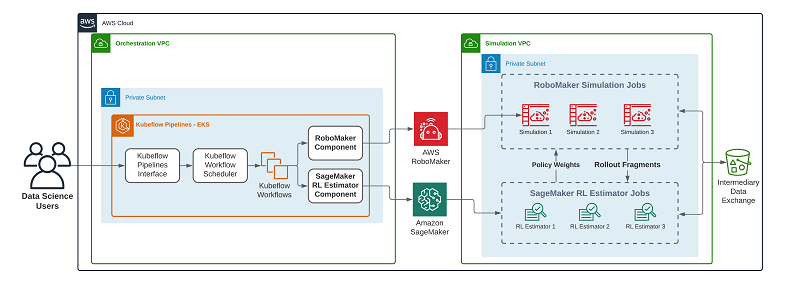
With Amazon SageMaker RL Components for Kubernetes, you can use SageMaker RL Components in your Kubeflow pipelines to invoke and parallelize SageMaker training jobs and AWS RoboMaker simulation jobs as steps in your RL training workflow, without having to worry about how it runs under the hood. The following diagram illustrates the pipeline workflow for SageMaker RL Components
SageMaker Components in your Kubeflow pipeline simply loads the components and describes your pipeline using the Kubeflow Pipelines SDK. SageMaker RL uses open-source libraries such as Anyscale’s Ray to start training an RL agent by collecting experience from Gazebo (an open-source software to simulate populations of robots in complex indoor and outdoor environments) in AWS RoboMaker using ROS (a set of software libraries and tools that help you build robot applications). When the training is completed, the RL agent model is stored in an Amazon Simple Storage Service (Amazon S3) bucket, and an Amazon SageMaker inference node can be created for deployment in production. You can then download the model to the robot with the same ROS structure from the simulation to perform the required tasks.
Use case: Woodside Energy deploys robotics in oil and gas environments
Woodside Energy uses AWS RoboMaker with Amazon SageMaker Kubeflow operators to train, tune, and deploy reinforcement learning agents to their robots to perform manipulation tasks that are repetitive or dangerous. This framework will allow the team to iterate and deploy at scale.
“Our team and our partners wanted to start exploring using machine learning methods for robotics manipulation,” says Kyle Saltmarsh, Robotics Engineer at Woodside Energy. “Before we could do this effectively, we needed a framework that would allow us to train, test, tune, and deploy these models efficiently. Utilizing Kubeflow components and pipelines with SageMaker and RoboMaker provides us with this framework and we are excited to have our roboticists and data scientists focus their efforts and time on algorithms and implementation.”
Woodside and AWS engaged Max Kelsen to assist in the development and contribution of the RoboMaker and RLEstimator components that enable the pipelines described in this project. Max Kelsen leverages open source throughout most of its work, and views participation in these communities as strategically important to delivering the best outcomes for our clients.
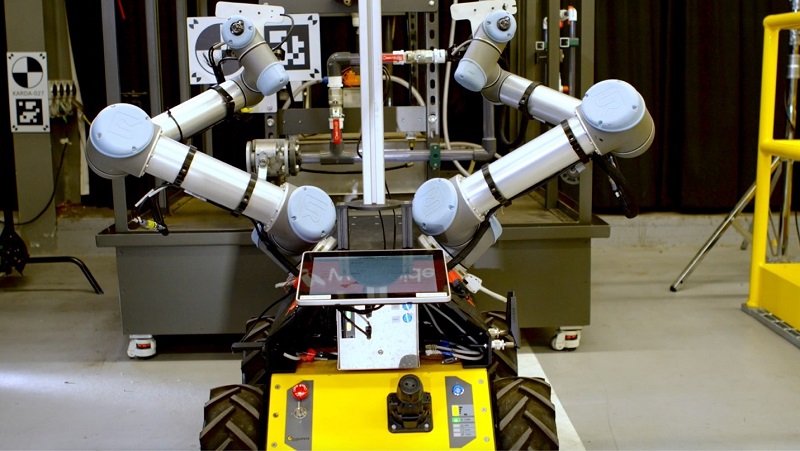
In the following image, Ripley, a custom-built robotics platform by Woodside Energy, is getting ready to perform a double block and bleed, a manual pump shutdown procedure that involves turning multiple valves in sequence. Ripley is based on a Clearpath Robotics Husky equipped with two Universal Robotics UR5 arms, Intel RealSense D435 cameras on each wrist, and a Kodak PixPro body camera. The reinforcement learning formulation utilizes the joint states and camera views as inputs to the agent and outputs optimal trajectories for valve manipulation.
Getting started with SageMaker RL components
In a typical Kubeflow pipeline, each component encapsulates your logic in a container image. As a developer or data scientist, you bring in your training, data preprocessing, model serving, or other logic wrapped in a Kubeflow Pipelines ContainerOp function, which builds your code into a new container. Alternatively, you can put the code into a custom container image and push it to a container registry such as Amazon Elastic Container Registry (Amazon ECR). When the pipeline runs, the component’s container is instantiated on one of the worker nodes on the Kubernetes cluster running Kubeflow, and your logic is implemented. Pipeline components can read outputs from the previous components and create outputs that the next component in the pipeline can consume.
When you use SageMaker Components in your Kubeflow pipeline, rather than encapsulating your logic in a custom container, you simply load the components and describe your pipeline using the Kubeflow Pipelines SDK. When the pipeline runs, your instructions are translated into a SageMaker job or deployment. This workload runs on the fully managed infrastructure of SageMaker. You also get all the benefits of a typical SageMaker capability, including Managed Spot Training, automatic scaling of endpoints, and more.
You have separate VPCs for orchestration and simulation. The reason is that no direct communication is needed between the RLEstimator or AWS RoboMaker jobs and the Kubeflow Pipelines components. The components interact directly with the AWS RoboMaker and SageMaker APIs, but not the jobs themselves. The components poll the APIs for the status of the jobs and any related Amazon CloudWatch Logs, and the responses are reflected back to the Kubeflow Pipelines UI. This offers a single interface for viewing the status of the running jobs.
The orchestration VPC utilizes both public and private subnets and a NAT gateway. The Amazon Elastic Kubernetes Service (Amazon EKS) worker nodes are launched into a private network, and use a route to the NAT gateway in the public subnet to interact with AWS APIs, and also to pull public Docker images to run on the cluster. For this post, we allow public access to the EKS cluster endpoint. This allows you to run kubectl port forwarding from your local machine and by doing so open up a tunnel to access the Kubeflow UI. In a production system, we suggest placing the Kubeflow service behind an Application Load Balancer (ALB) and secure using AWS Identity and Access Management (IAM).
Prerequisites
To run the following use case, you need the following:
- Kubernetes cluster – You can use your existing cluster or create a new one. The fastest way to get one up and running is to launch an EKS cluster using eksctl. For instructions, see Getting started with eksctl. Create a simple cluster with two CPU nodes to run this example. We tested this example on a 2 c5.xlarge. You just need enough node resources to run the SageMaker Component containers and Kubeflow. Training and deployments run on the SageMaker and AWS RoboMaker managed infrastructure.
- Kubeflow Pipelines – Install Kubeflow Pipelines on your cluster. For instructions, see Step 1 in Deploying Kubeflow Pipelines. Your Kubeflow Pipelines version must be 0.5.0 or above. Optionally, you can install all of Kubeflow, which includes Kubeflow Pipelines.
- SageMaker and AWS RoboMaker components prerequisites – For instructions on setting up IAM roles and permissions, see Amazon SageMaker Components for Kubeflow Pipelines. You need three IAM roles for the following:
- Kubeflow pipeline pods to access SageMaker and AWS RoboMaker and launch training and simulation jobs.
- Amazon SageMaker execution role to access other AWS resources such as Amazon S3.
- AWS RoboMaker execution role to access other AWS resources such as Amazon S3.
You can launch an EKS cluster from your laptop, desktop, Amazon Elastic Compute Cloud (Amazon EC2) instance, or SageMaker notebook instance. This instance is typically called a gateway instance. Because Amazon EKS offers a fully managed control plane, you only use out-of-the-box the gateway instance to interact with the Kubernetes API and worker nodes. The instance should have a role that allows for interaction with the EKS cluster. The code in the examples here was run from a local device with access to the EKS cluster.
Solution overview
The code, configuration files, and Jupyter notebooks used in this post are available on GitHub. The following walkthrough is provided to explain the key concepts. Rather than copying code from these steps, we recommend running the prepared Jupyter notebook. In this post, we walk through the following high-level steps:
- Configure your dependent resources.
- Clone the example repository and install dependencies.
- Open the example Jupyter notebook.
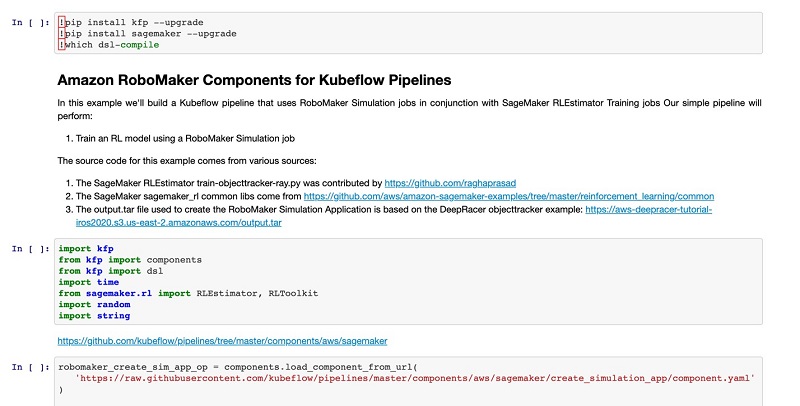
- Install the Kubeflow Pipelines SDK and load SageMaker pipeline components.
- Prepare your training datasets and upload them to Amazon S3.
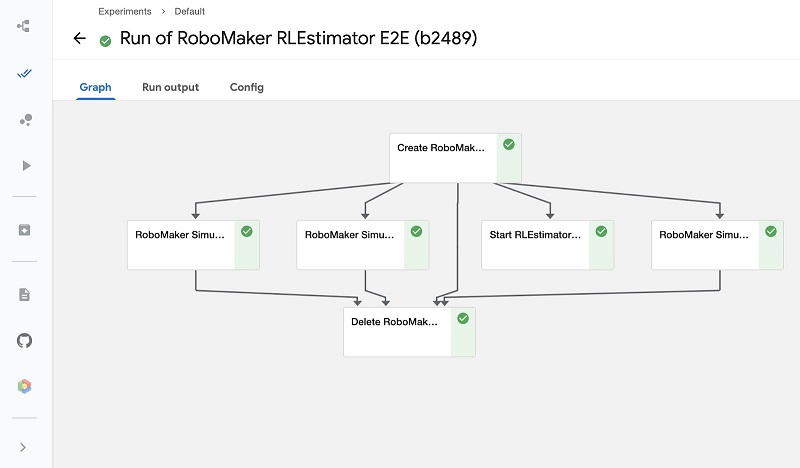
- Create your Kubeflow pipeline.
- Compile and run your pipeline.
Configuring your dependent resources
If you’re following the proposed architecture from this post, you run the simulation jobs in a private subnet. To ensure that the running jobs have connectivity to AWS resources, add VPC endpoints for the following services:
- Amazon S3
- CloudWatch
Next, create an S3 bucket to host your simulation job and RLEstimator job source files. The jobs also use this bucket to communicate by writing config files. The bucket should be in the same Region that you’re running the rest of your infrastructure, because VPC endpoints are locked to accessing resources within the same Region.
Finally, you need to configure an IAM role with access to the S3 bucket and AmazonSageMakerFullAccess and AWSRoboMaker_FullAccess policies.
Cloning the example repository and installing dependencies
Open a terminal and SSH to the EC2 gateway instance that you use to communicate with your EKS cluster. After you log in, clone the example repository to access the example Jupyter notebook. See the following code:
As part of the previous step, you installed Jupyter. To open the Jupyter notebook on your gateway instance, complete the following steps:
Nicholas Therkelsen-Terry is CEO and Co-Founder of Max Kelsen, a machine learning and artificial intelligence solutions company. Nick has a broad range of expertise spanning across business, economics, sales, management and law. Nick has a deep theoretical and applied understanding of cutting-edge machine learning techniques and has been widely recognized as an expert and thought-leader in this field. Nick is a founding member and board representative of the Queensland AI Hub, a large investment supporting the development of the AI industry, creating more jobs and providing aspiring AI engineers with a space of their own to contribute to Australia’s innovation growth.
Nicholas Thomson is a Software Development Engineer with AWS Deep Learning. He helps build the open-source deep learning infrastructure projects that power Amazon AI. In his free time, he enjoys playing pool or building proof of concept websites.
Ragha Prasad is a software engineer on the AWS RoboMaker team. Primarily interested in robotics and artificial intelligence. In his spare time, he likes to travel, work on art projects and catch up on documentaries.
Sahika Genc is a senior applied scientist at Amazon artificial intelligence (AI). Her research interests are in smart automation, robotics, predictive control and optimization, and reinforcement learning (RL), and she serves in the industrial committee for the International Federation of Automatic Control. She leads science teams in scalable autonomous driving and automation systems, including consumer products such as AWS DeepRacer and SageMaker RL. Previously, she was a senior research scientist in the Artificial Intelligence and Learning Laboratory at the General Electric (GE) Global Research Center.