AWS 기술 블로그
AWS와 NVIDIA로 Physical AI 가속화: 시뮬레이션과 실제 학습을 통한 프로덕션 레디 애플리케이션 구축
이 글은 AWS Open Source Blog의 “Accelerating physical AI with AWS and NVIDIA: building production-ready applications with simulation and real-world learning by Srinivas Nidamarthi, Alex Mevec, Ali Shahrokni, Brian Kreitzer, and Raja GT” 게시글을 번역한 글 입니다.
디지털 지능을 넘어 Physical AI를 정의하다
Physical AI는 인공지능의 새로운 진화 방향으로, 순수한 컴퓨팅 시스템을 넘어 물리적 세계를 직접 인지하고, 추론하며, 상호작용하는 지능형 에이전트로의 확장을 의미합니다. 디지털 도메인에서 정보를 처리하는 기존 AI 시스템(챗봇이나 추천 엔진 등)과 달리, Physical AI는 센서와 액추에이터가 장착된 시스템에 지능을 내장하여 실제 환경에서 의미 있고 적응적이며 자율적인 행동을 수행합니다.
로보틱스는 Physical AI의 가장 정교한 애플리케이션으로, 복잡한 조작, 내비게이션, 조립 작업 등을 수행합니다. 하지만 Physical AI의 범위는 이에 그치지 않습니다. 동적 교통 상황에 대응하는 자율주행차, 인프라 검사를 수행하는 드론, 패키지 걸림을 방지하기 위해 자율적으로 속도를 조정하는 스마트 컨베이어 등 다양한 영역으로 확장됩니다. 이 애플리케이션들은 환경 조건을 감지하고, 물리적 데이터를 실시간으로 처리하며, 적응적 응답을 실행하는 공통 요구사항을 공유합니다.
이 신흥 분야는 Morgan Stanley가 2050년까지 5조 달러에 도달할 것으로 전망하는 시장 기회를 나타냅니다. 이러한 성장은 물리적으로 훈련된 AI 휴머노이드가 인간처럼 자율적이고 직관적으로 작업하는 제로샷 제조(zero-shot manufacturing) 능력에 의해 주도되며, 전 세계 인건비의 30~40%를 자동화할 잠재력을 가지고 있습니다. 그러나 이러한 휴머노이드가 자세 균형 같은 기본 능력에 대해 사전 훈련되어 있더라도, 특정 실제 애플리케이션에 적용하려면 여전히 Physical AI 튜닝이 필요합니다. 제조 현장에 로봇 팔이나 휴머노이드를 배포하려는 조직에게는 실제 비즈니스 문제를 해결하기 위한 실용적인 경로가 필요합니다.
개발에서 배포까지의 과제
DHL Supply Chain의 최근 연구는 창고에서 로보틱스를 통합할 때의 구현 및 관리 과제를 잘 보여줍니다. 44%가 이미 로보틱스를 배포했지만, 공급망 임원 중 34%만이 자사의 기술 배포가 제대로 수행되고 있다고 생각합니다. 이는 Physical AI 모델의 실제 배포, 모니터링, 거버넌스가 성공적인 성과와 비즈니스 결과를 위해 얼마나 중요한지를 보여줍니다. Amazon Web Services (AWS)는 Amazon 창고 및 공급망 전반에 걸쳐 Physical AI 기반 로보틱스를 대규모로 운영해 온 경험을 통해 이 영역에서 입증된 역량을 갖추고 있습니다.
기존 Physical AI 개발은 상당한 장벽에 직면합니다. 자율 시스템을 구축하려면 물리적 프로토타입에 대한 막대한 자본 투자가 필요하고, 시행착오 학습 과정에서 안전 문제가 발생하며, 반복 속도도 제한됩니다. 물리 및 환경 기반 시뮬레이션으로 대체하면 다양한 시나리오에 대해 병렬 학습이 가능해집니다. 그러나 시뮬레이션만으로는 마찰 변화, 재료 변형, 센서 노이즈, 환경적 예측 불가능성 등 실세계 물리의 전체 복잡성을 포착할 수 없습니다.
이 블로그에서는 시뮬레이션-현실 간 격차(sim-to-real gap)를 해소하는 포괄적인 레퍼런스 아키텍처를 제시합니다. AWS 인프라와 오픈 로보틱스 개발 플랫폼인 NVIDIA Isaac을 기반으로 구축된 이 접근법을 통해, 조직은 Physical AI 애플리케이션의 개발, 배포, 지속적 개선을 대규모로 가속화할 수 있습니다.
이중 경로 접근법: 시뮬레이션과 실제 학습
시뮬레이션은 빠르고 안전한 대규모 실험을 가능하게 하지만, 실세계 배포에서는 예측 불가능한 물리적 조건을 처리할 수 있는 시스템이 필요합니다. NVIDIA Isaac을 활용하면 물리적으로 정확한 가상 환경에서 로봇 정책(policy)을 충분히 학습하고 테스트한 후 엣지에 배포할 수 있습니다.
NVIDIA Isaac은 NVIDIA Isaac Sim과 NVIDIA Isaac Lab과 같은 오픈 모델, 라이브러리 및 오픈 소스 프레임워크로 구성됩니다. Isaac Sim은 NVIDIA Omniverse 라이브러리를 기반으로 구축된 오픈 소스 로보틱스 시뮬레이션 참조 프레임워크로, AI 기반 로봇의 설계, 테스트, 합성 훈련 데이터 생성을 위한 물리적으로 정확하고 GPU 가속된 가상 환경을 제공합니다. NVIDIA Isaac Lab은 Isaac Sim 위에 구축된 오픈 소스 통합 로봇 학습 프레임워크로, 강화 학습과 모방 학습을 활용해 고급 로봇 정책을 훈련합니다.
Isaac Sim이 물리적으로 정확한 시뮬레이션 환경을 제공하는 반면, Isaac Lab은 이를 수천 개의 병렬 훈련 시나리오로 확장합니다. 두 프레임워크를 함께 사용하면 실제 배포 이전에 신속한 정책 개발이 가능해집니다.
시뮬레이션 기반 훈련의 힘
시뮬레이션은 Physical AI 개발을 위한 효율적인 시작점을 제공합니다. Isaac Sim을 사용하면 로봇 시스템과 운영 환경의 디지털 트윈을 생성할 수 있어, 여러 물리적 프로토타입을 구축하는 비용과 시간 없이 신속한 실험이 가능합니다. AWS 인프라에서 Isaac Sim을 실행하면 Physical AI 개발자에게 다음과 같은 핵심 이점을 제공합니다:
신속한 반복과 비용 효율성: 값비싼 하드웨어를 손상시키거나 안전 위험을 초래하지 않으면서 수천 개의 시나리오를 병렬로 테스트할 수 있습니다. 여러 물리적 프로토타입을 구축하는 대신 가상으로 설계 대안을 평가할 수 있습니다. 예를 들어, 깨지기 쉬운 물체를 잡는 법을 학습하는 로봇 팔은 추가 비용 없이 시뮬레이션에서 수없이 실패하며 반복 학습할 수 있습니다.
대규모 물리 기반 학습: 시뮬레이션은 초기 정책 학습에 충분한 물리적 이해를 제공합니다. 수백 개의 가상 환경을 동시에 실행하여 몇 주간의 물리적 로봇 학습을 몇 시간으로 압축하는 대규모 병렬 훈련이 가능합니다. 훈련 중 물리 파라미터를 체계적으로 변화시키는 도메인 랜덤화(domain randomization) 같은 기법을 통해 모델이 실제 조건에 일반화할 수 있도록 돕습니다.
실세계 검증의 필요성
시뮬레이션의 장점에도 불구하고, 프로덕션 레디 Physical AI 애플리케이션에는 실세계 배포가 필수적입니다. 시뮬레이션과 실제 물리 간의 차이를 나타내는 “sim-to-real gap”은 성능, 안전성, 신뢰성, 운영 효과에 큰 영향을 미칠 수 있습니다.
물리 정밀도와 환경 복잡성: 실제 센서는 시뮬레이션이 근사할 수밖에 없는 미묘한 차이를 포착합니다. 표면 질감 변화, 조명 조건, 재료 탄성, 동적 환경 요인 등이 그 예입니다. 프로덕션 환경에서는 근처에서 이동하는 작업자나 변화하는 주변 조건 등 시뮬레이션에서 예측하기 어려운 상황이 발생합니다.
지속적 개선: 시스템이 프로덕션에서 운영되면서 모델 개선에 필요한 새로운 상황을 만나게 됩니다. 운영 데이터는 엣지 케이스와 성능 격차를 드러내며, 목표 지향적인 모델 개선을 안내합니다. 힘 센서, 관절 인코더, 카메라, 가속도계 등 포괄적인 센서 피드백을 통한 실세계 테스트는 모델 효과에 대한 실측 데이터(ground truth)를 제공하고, 밀리초 단위 데이터 스트리밍으로 지속적인 성능 모니터링을 가능하게 합니다.
엔드투엔드 아키텍처 개요
다음 아키텍처 가이던스는 시뮬레이션 기반과 실세계 강화학습이라는 두 가지 상호 보완적 경로를 통해 Physical AI 로보틱스 애플리케이션 개발을 지원합니다. 이 솔루션은 NVIDIA Isaac을 통한 물리 시뮬레이션, 또는 힘·비전·위치·모션 센서 같은 실세계 지능형 센서 데이터를 활용하여 물리를 다룹니다. 시뮬레이션 경로는 실세계 구현 전에 가상 환경에서 모델을 학습하고, 실세계 경로는 센서 데이터를 통해 실제 물리적 상호작용을 포착합니다. 학습된 모델은 엣지 디바이스에 배포되어 추론 기반 제어 정책을 실행하고, 반복 학습을 위한 실시간 센서 데이터를 수집합니다.
참조 아키텍처는 병렬로 작동하는 두 개의 상호 보완적인 학습 루프를 구현합니다.
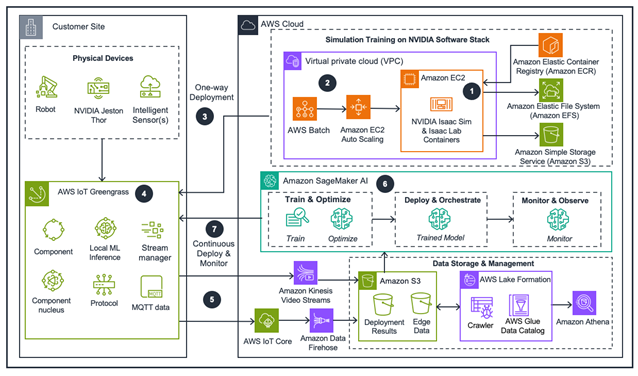
그림 1: 이 가이던스 아키텍처는 AWS에서 고급 AI 기능을 물리적 로보틱스 시스템과 통합하여 실제 환경에서 자율 운영을 가능하게 하는 방법을 보여줍니다.
시뮬레이션 훈련 루프 – 구축 및 훈련
- GPU 기반 Amazon Elastic Compute Cloud (Amazon EC2) 인스턴스의 컨테이너에서 실행되는 Isaac Sim으로 시작됩니다. 엔지니어는 로봇의 키네마틱스를 모델링하고, 물리적 제약 조건을 설정한 뒤, 실제 운영 시나리오를 반영한 가상 환경을 만듭니다. Isaac Lab은 물리 파라미터, 환경 조건, 태스크 난이도를 다양하게 바꿔가며 수천 개의 병렬 시나리오로 학습을 스케일아웃합니다.
- AWS Batch는 Amazon EC2 Auto Scaling 그룹을 활용해 GPU 리소스를 동적으로 프로비저닝하며, 시뮬레이션 워크로드를 오케스트레이션합니다. 학습 부하가 높아지면 인스턴스를 자동으로 늘리고, 유휴 시에는 줄여서 비용 효율을 유지합니다. 훈련된 모델과 관련 정책은 Amazon Simple Storage Service (Amazon S3)에 저장되어 내구성이 높고 버전 관리되는 스토리지를 제공합니다. Amazon Elastic Container Registry (Amazon ECR)는 환경 전반에 걸쳐 일관된 배포를 위해 컨테이너 이미지를 관리합니다.
실제 학습 루프 – 배포 및 모니터링
- 시뮬레이션 학습을 통해 후보 모델이 만들어지면, 엔지니어들은 실시간 추론을 위해 NVIDIA Jetson Thor와 같은 물리적 로봇 컨트롤러에 AWS IoT Greengrass 기반으로 배포합니다. 엣지 디바이스는 실시간 ML 추론으로 로봇을 제어하는 동시에, 센서 데이터를 수집하는 두 가지 역할을 수행합니다.
- AWS IoT Greengrass 구성 요소는 여러 타입의 센서로부터 실시간 피드백을 처리합니다.
- 멀티모달 데이터는 두 경로로 수집됩니다. 센서 텔레메트리(MQTT 기반 시계열 데이터)는 AWS IoT Core와 Amazon Data Firehose를 통해 Amazon S3 데이터 레이크로 적재되고, 카메라 영상은 Amazon Kinesis Video Streams를 통해 캡처됩니다. AWS Glue 크롤러는 운영 데이터를 카탈로그화하여 Amazon Athena로 쿼리하거나, AWS Lake Formation으로 거버넌스를 적용할 수 있습니다.
- Amazon SageMaker AI는 실제 운영 데이터를 배치 단위로 처리해 모델을 재학습·최적화하며, sim-to-real gap을 줄여나갑니다.
- 개선된 모델은 AWS IoT Greengrass를 통해 엣지 디바이스에 재배포됩니다. 모니터링 레이어가 성능 메트릭을 지속 추적하다가 모델 드리프트가 감지되면 자동으로 재학습 워크플로를 트리거합니다. 운영 데이터 생성 → 모델 정제 → 재배포 → 다시 데이터 수집으로 이어지는 이 사이클이 반복되면서, 로봇은 지속적으로 성능이 개선됩니다.
실세계 적용 사례: 산업 조립
전자 제조, 자동차 조립, 정밀 엔지니어링에서 흔히 마주하는 과제를 예로 들어보겠습니다. 좁은 공차의 기어 부품을 삽입하는 contact-rich 조작 작업입니다. 이런 작업은 접촉 힘에 실시간으로 반응하는 정교한 제어가 필수적입니다. Universal Robots (UR)는 Isaac 라이브러리 통합을 통해 이를 구현했습니다. 로봇 팔이 적응형 힘 피드백으로 마이크론 단위 정밀도의 peg-in-hole 삽입을 수행합니다.
시뮬레이션 단계: Isaac Sim에서 UR 로봇 팔, 워크피스 형상, 조립 지그를 모델링하고, 재료 물성, 마찰 계수, 접촉 역학 등 물리 파라미터를 정의합니다. Isaac Lab에서 강화 학습을 수행하되, 삽입 각도·초기 위치·마찰·부품 공차를 도메인 랜덤화로 변화시키며 수천 개 병렬 시나리오로 학습합니다. 이를 통해 로봇이 접촉을 감지하고, 접근 각도를 보정하며, 적절한 힘을 가하는 초기 정책을 만들어냅니다.
배포 및 정제: 학습된 정책은 AWS IoT Greengrass를 통해 로봇 컨트롤러에 배포됩니다. 실제 생산 테스트 중 힘 센서, 조인트 인코더, 위치 센서 데이터가 AWS로 실시간 스트리밍되면서 sim-to-real gap이 드러납니다 — 예컨대 실제 마찰이 시뮬레이션보다 크거나, 부품 공차 편차가 모델링 범위를 넘는 경우입니다.
Amazon SageMaker는 이 운영 데이터로 모델을 재학습하여 실제 물리 조건을 반영합니다. 엔지니어는 특정 힘 프로파일과 삽입 실패 간의 상관관계를 파악해 타겟 개선을 적용하고, 정제된 모델을 엣지에 재배포해 성공률을 높입니다. 로봇이 새로운 변동을 만날 때마다 이 루프가 반복되며, 모니터링 시스템이 핵심 KPI를 추적하다가 허용 범위를 벗어나면 자동으로 재학습을 트리거합니다.
그림 2: 로봇 팔 기어 조립
이 이중 경로 아키텍처는 다양한 Physical AI 사례에 그대로 적용됩니다. 의약품 핸들링을 위한 정밀 매니퓰레이션, 동적 창고 환경의 모바일 로봇 내비게이션, 물류 현장의 휴머노이드 로봇 등 도메인이 달라도 동일한 원칙으로 확장할 수 있습니다.
성공을 위한 모범 사례
견고한 시뮬레이션부터 시작하기: 가능하면 실제 프로토타입을 기반으로 물리 모델을 정밀하게 정의하는 데 투자하세요. RL 보상 함수를 설계하고, 프로토타입으로 정확도를 검증하면서 시뮬레이션 루프 안에서 물리 파라미터를 반복 튜닝할 때 가장 좋은 결과를 얻을 수 있습니다. 실제 배포 전에 도메인 랜덤화를 충분히 적용하면 학습 결과의 강건성이 높아집니다. 시뮬레이션 반복은 물리 테스트보다 비용이 훨씬 낮습니다.
점진적으로 배포하기: 전체 프로덕션 전에 통제된 환경에서 먼저 실제 테스트를 시작하세요. 초기 데이터로 시뮬레이션 가정을 검증하고, 핵심 gap을 조기에 식별합니다.
포괄적으로 계측하기: 다양한 센서를 배치해 멀티모달 데이터를 확보하고 물리 모델을 검증하세요. 실제 피드백이 풍부할수록 모델 정제가 효과적이며, 자동 재학습 트리거와 지속적 모니터링이 가능해집니다.
시뮬레이션-현실 동기화 유지하기: 실제 데이터에서 얻은 물리적 인사이트를 시뮬레이션 모델에 반영해 다음 학습 사이클을 개선하세요. 시뮬레이션과 현실이 서로를 보완하는 선순환 구조를 만드는 것이 핵심입니다.
대규모 실용적 Physical AI
로보틱스를 비롯한 자율 시스템 분야의 Physical AI는 이미 연구 단계를 넘어 프로덕션 환경에 진입했습니다. 이 참조 아키텍처는 제조, 물류, 헬스케어 등 실제 비즈니스 문제를 해결하는 자율 시스템을 구축하기 위한 실용적이고 확장 가능한 경로를 제시합니다.
시뮬레이션의 속도·안전성과 실제 환경 학습의 정확성을 결합하면, 개발 사이클을 단축하고 비용을 줄이면서도 운영 경험을 통해 지속적으로 개선되는 시스템을 배포할 수 있습니다. 이 아키텍처는 시뮬레이션 우선과 현실 우선 접근법을 모두 지원하므로, 다양한 유스케이스와 조직의 준비 수준에 맞춰 유연하게 적용할 수 있습니다.
Physical AI 도입이 가속화되는 지금, 성공하는 조직은 시뮬레이션과 현실을 효과적으로 연결해 각각의 강점을 살려 프로덕션 레디 애플리케이션을 만드는 곳이 될 것입니다. AWS의 확장 가능한 인프라와 NVIDIA 물리 시뮬레이션 플랫폼을 활용하면, 그 미래는 지금 바로 시작할 수 있습니다.
시작할 준비가 되셨나요? AWS Guidance for Physical AI for Robotics에서 참조 아키텍처를 확인하세요.
추가 리소스
- NVIDIA Isaac Sim : 물리 기반 시뮬레이션, 테스트, 합성 데이터 생성
- AWS IoT Greengrass : 엣지 배포
- Amazon SageMaker AI : 모델 개발 및 지속적 정제
- AWS Batch : GPU 가속 컴퓨팅