Documentazione
Risorse del mondo di simulazione
Abbiamo creato ulteriori ambienti da utilizzare con i tuoi robot. Possono essere usati per testare applicazioni di riconoscimento facciale, navigazione, evitamento degli ostacoli e machine learning, e possono essere modificati in base ai tuoi casi d’uso specifici.
Mondi domestici WorldForge

AWS RoboMaker WorldForge supporta la generazione automatica di una moltitudine di ambienti domestici interni, completi di planimetrie e arredi configurabili.
Mondo piccola casa
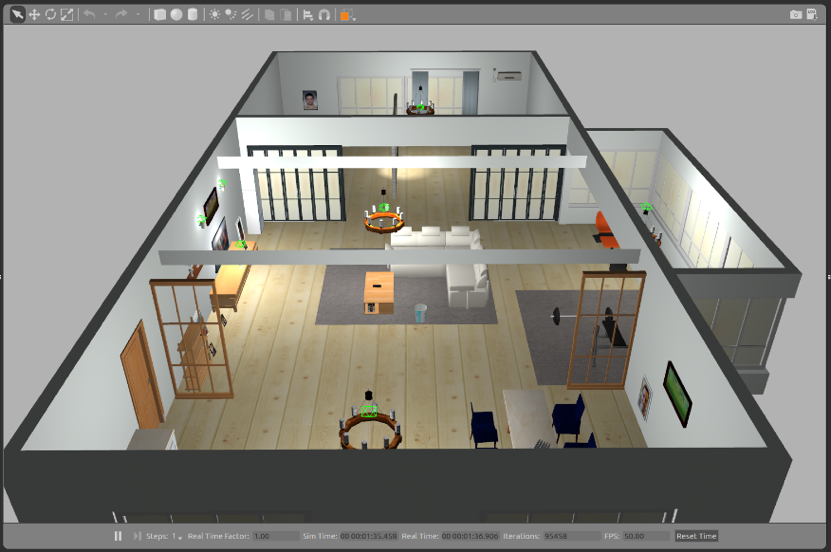
Inoltre, questo semplice mondo domestico è a tua disposizione. Offre una piccola casa con cucina, salotto, palestra e immagini che puoi personalizzare per testare il riconoscimento di immagini. Vi sono numerosi ostacoli tra cui il tuo robot può destreggiarsi.
Mondo Hospital
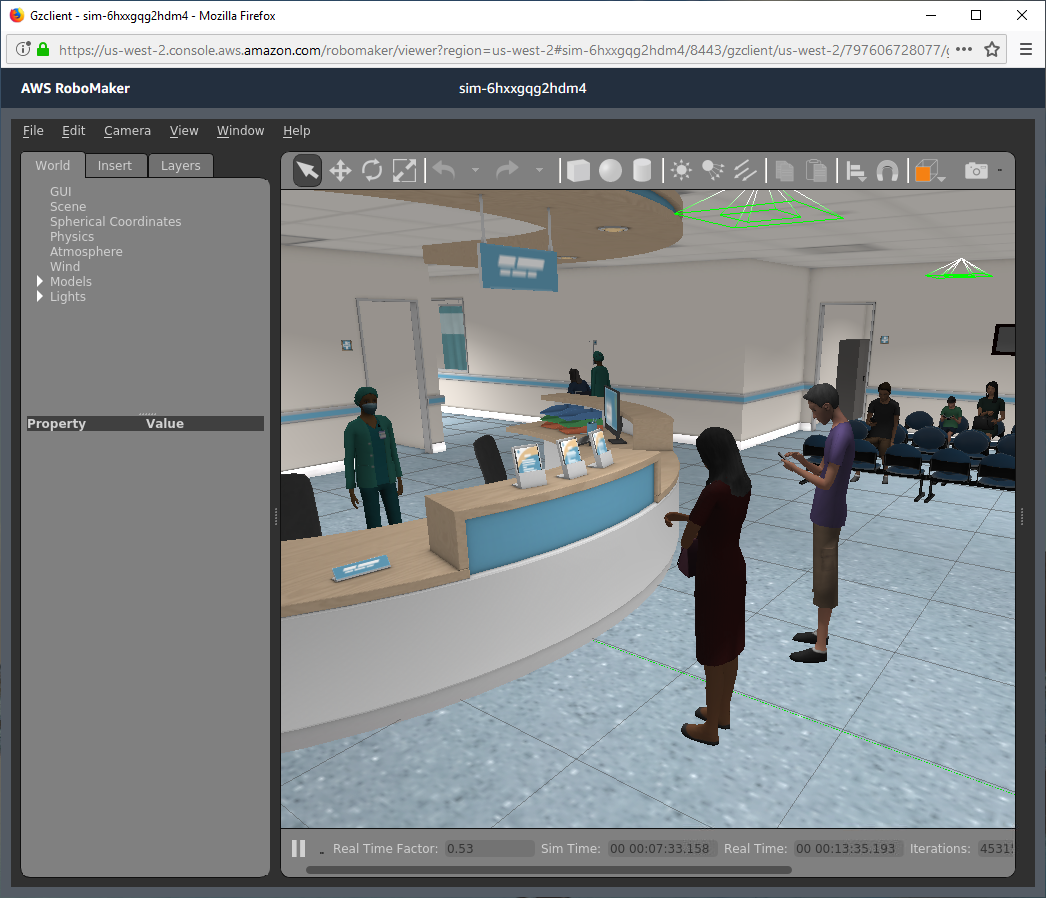
Un mondo con un grande ospedale dotato di reception e sala d'attesa, sale esami, stanze dei pazienti, magazzini e una sala per le pause del personale.
Mondo piccolo magazzino
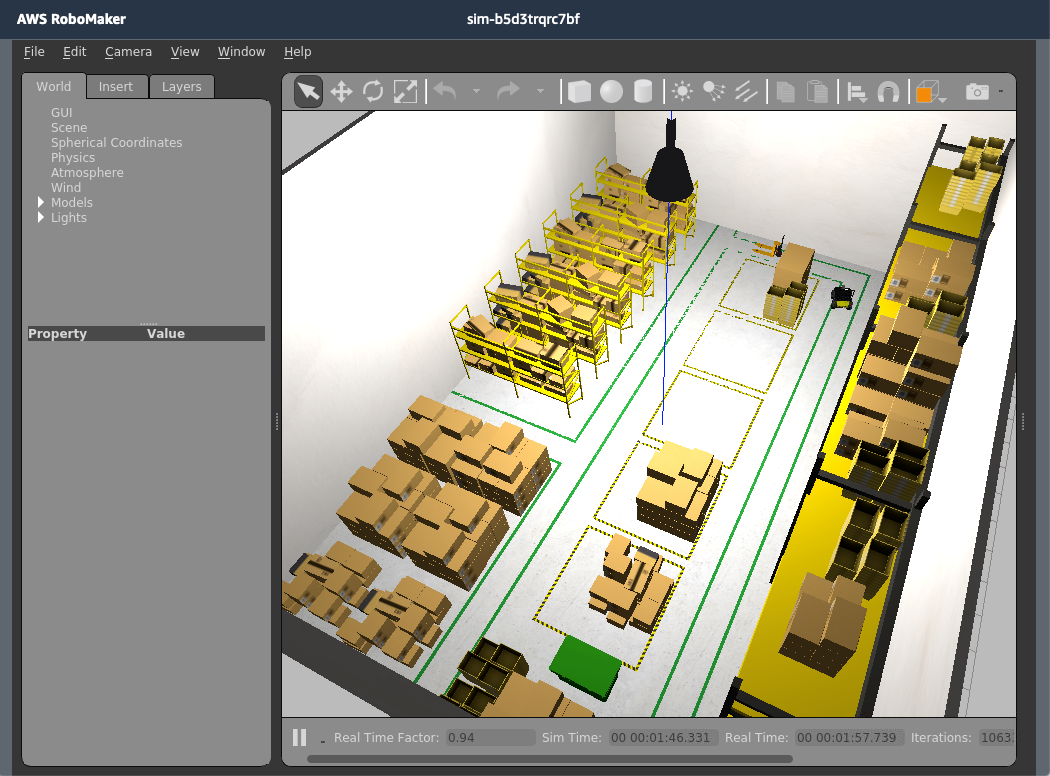
Un mondo con un piccolo magazzino per testare le tue applicazioni di robotica per casi d'uso di magazzini e logistica.
Libreria
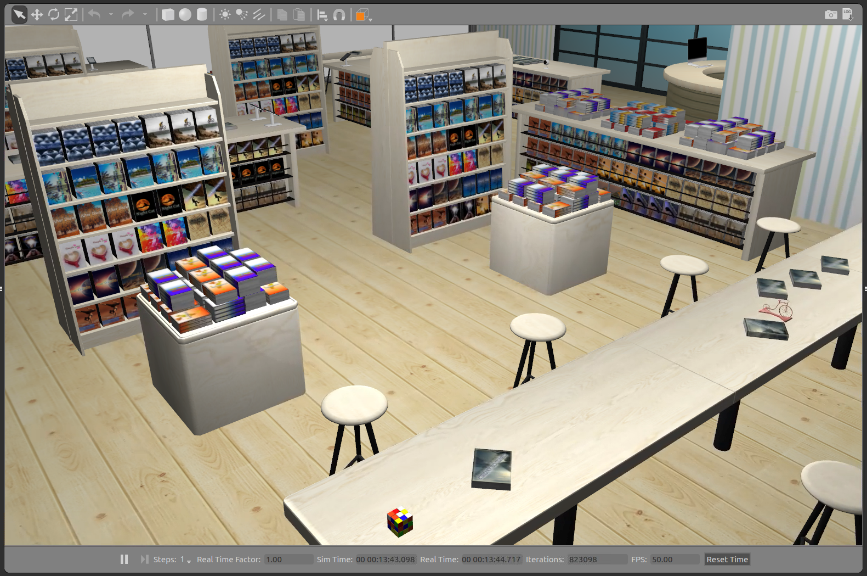
Spostati tra gli scaffali di libri in questa simulazione di una libreria. Include diversi ostacoli tra cui sedie e tavoli tra cui il tuo robot può muoversi.
Applicazioni di esempio
AWS RoboMaker include applicazioni di robotica di esempio per aiutarti a iniziare rapidamente. Costituiscono il punto di partenza per le funzionalità di comando vocale, riconoscimento, monitoraggio e gestione della flotta che sono tipicamente richieste per le applicazioni di robotica intelligente. Le applicazioni di esempio sono fornite con il codice dell'applicazione di robotica (istruzioni per la funzionalità del robot) e il codice dell'applicazione di simulazione (che definisce l'ambiente in cui verranno eseguite le simulazioni). Per iniziare a lavorare con gli esempi, consulta questa pagina.
Lancia in RoboMaker
Hello, World
Scopri le nozioni di base su come strutturare le applicazioni robotiche e quelle di simulazione, modificare codicI, costruire, avviare nuove simulazioni e distribuire applicazioni ai robot. Inizia da un modello di progetto di base che include un robot in un mondo di simulazione vuoto.
Navigazione
Naviga con il robot nelle sedi designate in una libreria simulata. Scopri come generare a livello procedurale una mappa delle zone occupate per tutti i Gazebo utilizzando il plugin per la creazione di una mappa.
Lancia in GitHub
Applicazione di avvio della simulazione
Avvia batch di simulazione in AWS RoboMaker con Code Pipeline e Step Functions. Scopri ulteriori informazioni nel repository di codice.
Guida del robot
Crea una mappa e guida il robot in una posizione designata nel simulatore RoboMaker. Scopri ulteriori informazioni nel repository di codice.
Apprendimento per rinforzo
Fuggi da un mondo labirinto addestrando un modello di apprendimento per rinforzo su AWS RoboMaker. Scopri ulteriori informazioni nel repository di codice.
Applicazioni robotiche end-to-end
Questa applicazione di esempio mostra un sistema robotico end-to-end con l'Open Source Rover del NASA JPL. Include un file URDF modellato sul celebro progetto open source. Scopri ulteriori informazioni nel repository di codice.
Simulazione di flotte multi-robot
Scopri come avviare una flotta di robot da simulazione in Gazebo, per consentire lo sviluppo e il test di applicazioni come pianificatori di percorsi e strumenti di gestione della flotta.
Scopri ulteriori informazioni nel repository di codice.
Monitoraggio del robot
Monitora i parametri operativi e dello stato di un robot in una libreria simulata utilizzando i parametri di Amazon CloudWatch e Amazon CloudWatch Logs. Ulteriori informazioni nel repository di codice.
Estensioni ROS
Le estensioni cloud di RoboMaker per ROS includono servizi quali Amazon Kinesis Video Streams per lo streaming di video, Amazon Rekognition per l’analisi di immagini e video, Amazon Lex per il riconoscimento vocale, Amazon Polly per la generazione vocale e Amazon CloudWatch per registrazione di log e monitoraggio. RoboMaker fornisce ciascuno di questi servizi cloud sotto forma di pacchetti ROS open source, per consentirti di estendere le funzioni sul tuo robot sfruttando le API cloud, il tutto in un framework software con cui hai familiarità.
Nel repository di codice sono disponibili ulteriori informazioni su ciascuna delle estensioni del servizio cloud.
Estensioni Cloud per ROS1
Kit di sviluppo hardware
Per creare robot e aggiungere funzionalità avanzate gli sviluppatori devono fare molte scelte. Per eliminare l’incertezza e accelerare lo sviluppo, i partner di AWS hanno creato una serie di kit di sviluppo di robotica che includono soluzioni HW complete, SW preinstallato e ampia documentazione e tutorial.

Intel - Kit per sviluppatori UP Squared RoboMaker
Il kit per sviluppatori UP Squared RoboMaker è il modo più semplice per iniziare con il tuo progetto di robotica basato su tecnologia AWS RoboMaker. È un pacchetto di avvio progettato per semplificare e velocizzare agli sviluppatori l’aggiunta di intelligenza artificiale (AI) e visione ai propri robot. Questo kit è dotato di un tutorial chiaro su come costruire hardware a livello di modulo e su come utilizzare i servizi cloud per accorciare i tempi di sviluppo. Gli sviluppatori sono stati in grado di aggiungere la visione artificiale ai loro robot in un solo giorno e di eseguire dimostrazioni di robotica nell’arco di tempo di pochi giorni. Con l'esperienza di Intel, AWS e AAEON insieme, questo kit mira a fornire agli sviluppatori un percorso che va dalla creazione del prototipo alla distribuzione sul campo.
Il kit include una scheda UP Squared con un processore x7-E3950 Intel® Atom™, una fotocamera D435i Intel® RealSense ™, una VPU Myriad™ X Intel® Movidius ™ ed è completamente compatibile con i servizi cloud AWS RoboMaker ed estende Robot Operating System (ROS), il framework di software di robotica open source.
Scopri il kit UP Squared RoboMaker e ordinalo oggi stesso
Ulteriori informazioni sulle partnership con Intel e Aaeon
.71e2a406fb99c58b15cc16feb27f4c11c20f5d62.png "NVIDIA_600x400.png")
Nvidia - Kit JetBot per robot AI con ROS e AWS RoboMaker
Nvidia accelera lo sviluppo robotico cloud-to-edge con AWS RoboMaker. La simulazione e lo sviluppo di robotica possono ora essere facilmente eseguiti nel cloud e distribuiti su milioni di robot e altre macchine autonome fornite da Jetson. Ciò include JetBot, la piattaforma di riferimento open source di NVIDIA, basata su Jetson Nano. Jetbot è facile da configurare e utilizzare, è compatibile con molti accessori e include tutorial interattivi che mostrano come sfruttare la potenza dell’AI per seguire gli oggetti, evitare collisioni e molto altro. Il kit JetBot per robot AI alimentato da Nvidia con tecnologia ROS e AWS RoboMaker include la scheda, un telaio robot completo, ruote e controller insieme a una batteria e una fotocamera da 8 MP. Una vasta documentazione viene in dotazione con il kit.
Scopri il kit Jetbot e ordina ora
Ulteriori informazioni sulla partnership con Nivida.
Qualcomm – Piattaforma Robotics RB3 con supporto integrato per AWS RoboMaker
Il supporto per le tecnologie Qualcomm di AWS RoboMaker di Amazon Web Services sta contribuendo a trasformare l'innovazione nella robotica. Con elaborazione eterogenea ad alte prestazioni, machine learning su dispositivo e visione artificiale, elaborazione di sensori ad alta fedeltà per percezione, odometria per localizzazione, mappatura e navigazione e connettività 4G LTE e Wi-Fi, la piattaforma Qualcomm Robotics RB3 offre agli sviluppatori strumenti per costruire robot in grado di accelerare l'innovazione, rivoluzionare la logistica e migliorare la nostra vita quotidiana. Il supporto integrato del kit Qualcomm Robotics RB3 per AWS Robomaker aiuta a sviluppare, testare e distribuire applicazioni di robotica intelligente su vasta scala e fornisce una soluzione edge-to-cloud per rendere più accessibile la creazione di applicazioni di robotica intelligente.
Vai alla pagina di seguito, per ulteriori informazioni sul kit Qualcomm Robotics RB3 e per acquistarlo
Ulteriori informazioni sull’impegno di Qualcomm nell'innovazione robotica
La vasta documentazione e il materiale di riferimento dettagliato per gli sviluppatori sono disponibili a questo link: https://developer.qualcomm.com/project/aws-robomaker-rb3



Trova ulteriori informazioni su AWS RoboMaker nella pagina delle Domande frequenti.
Ottieni l'accesso immediato al piano gratuito di AWS.