Documentação
Ativos do mundo da simulação
Criamos mais ambientes que você pode usar com os seus robôs. Esses ambientes podem ser usados para testar reconhecimento facial, navegação, prevenção de custos e machine learning, e podem ser modificados de acordo com os seus cenários.
Mundos das casas do WorldForge

O AWS RoboMaker WorldForge oferece suporte à geração automática de uma infinidade de ambientes domésticos internos, completos com plantas e móveis que podem ser configurados.
Mundo de pequenas casas
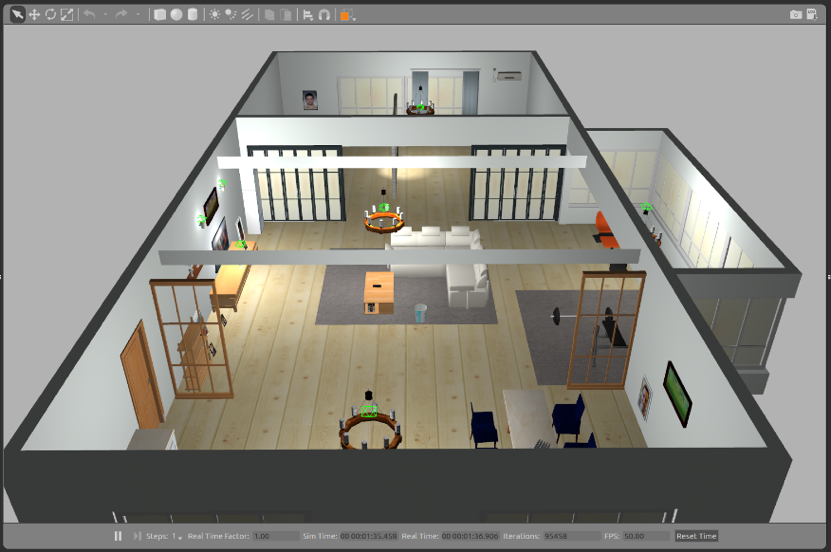
Além disso, este mundo doméstico simples está disponível para seu uso. Fornece uma pequena residência com cozinha, sala de estar, aparelhos de ginástica e quadros que você pode personalizar para testar o reconhecimento de imagens. Há vários obstáculos de navegação para seu robô.
Mundo do hospital
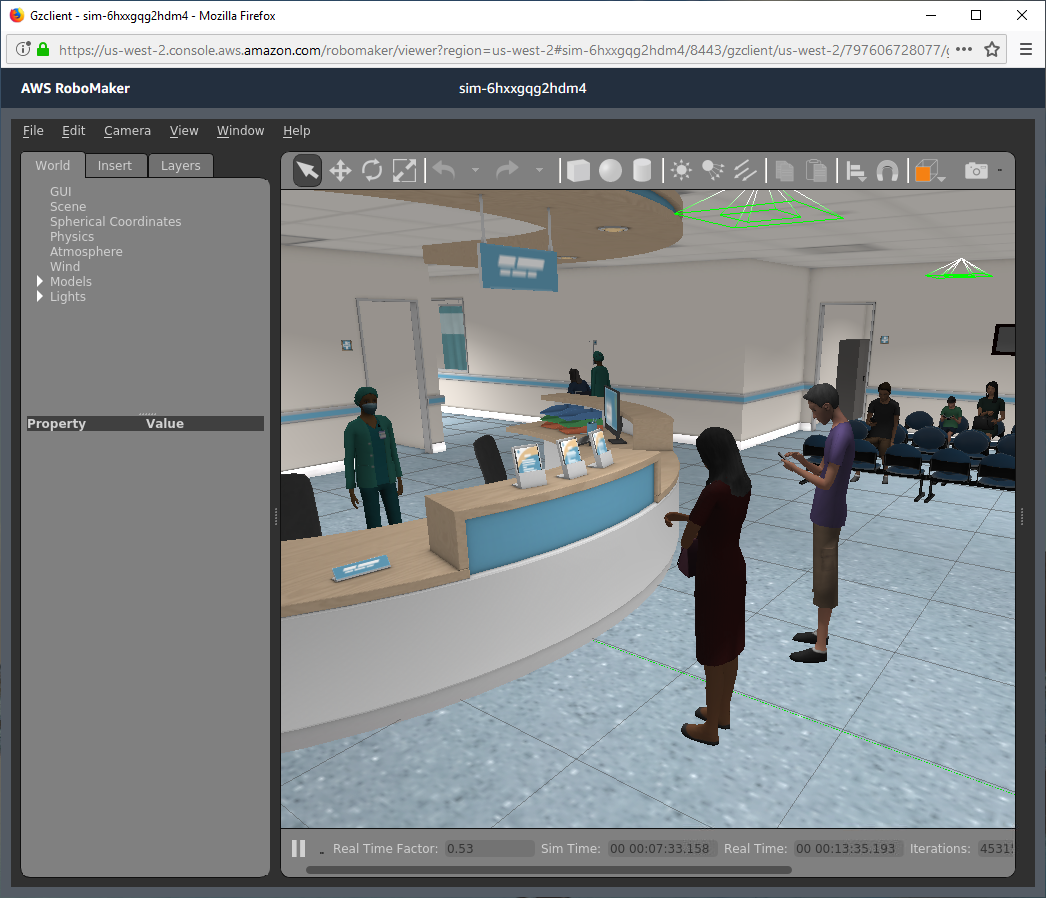
Um grande mundo de hospitais com recepção e sala de espera, salas de exames, salas de pacientes, depósito e sala de descanso para funcionários.
Mundo de pequeno depósito
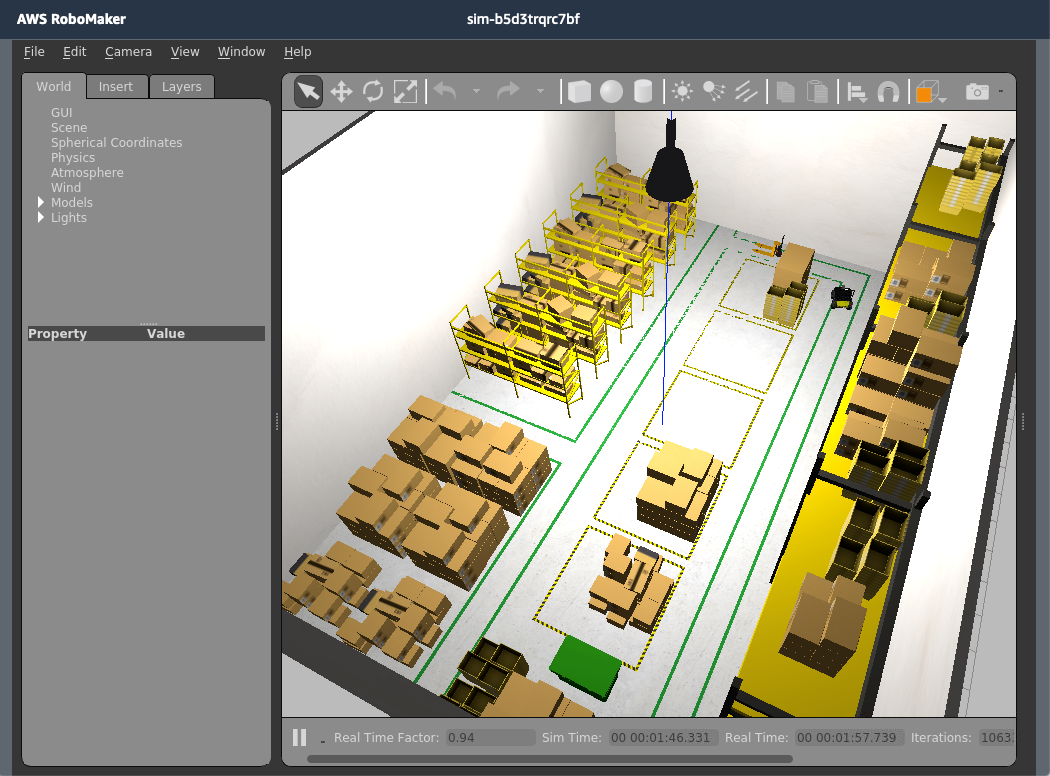
Um mundo de pequeno depósito para testar suas aplicações de robótica para casos de uso de armazém e logística.
Livraria
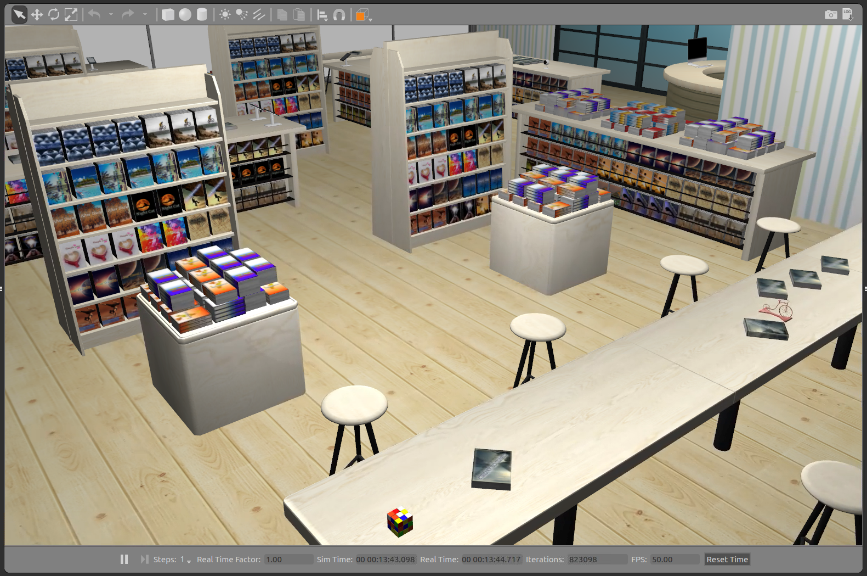
Navegue entre estantes de livros nesta livraria simulada. A livraria inclui vários obstáculos, incluindo cadeiras e mesas, para navegação pelo seu robô.
Aplicações de teste
O AWS RoboMaker inclui aplicações de amostra de robótica para ajudá-lo a começar a usar rapidamente. Eles fornecem o ponto de partida para os recursos de comando de voz, reconhecimento, monitoramento e gerenciamento de frota que normalmente são necessários para aplicativos robóticos inteligentes. Aplicativos de amostra vêm com código de aplicativo robótico (instruções para a funcionalidade do seu robô) e código de aplicativo de simulação (definindo o ambiente no qual suas simulações serão executadas). Você pode começar a usar as amostras aqui.
Executar no RoboMaker
Olá, mundo
Aprenda o básico sobre como estruturar seus aplicativos de robô e de simulação, editar código, criar, lançar novas simulações e implantar aplicativos em robôs. Comece com um modelo de projeto básico, incluindo um robô em um mundo de simulação vazio.
Navegação
Navegue até um robô para locais designados em um mundo simulado de livraria. Aprenda como gerar, de maneira procedimental, um mapa de ocupação para qualquer mundo do Gazebo usando um plugin de geração de mapas.
Executar no GitHub
Executor de simulação
Inicie simulações em lote no AWS RoboMaker com pipeline de código e Step Functions. Saiba mais no repositório de código.
Navegação com robô
Crie um mapa e navegue com o robô até um local designado no simulador RoboMaker. Saiba mais no repositório de código.
Aprendizado por reforço
Fuja de um mundo labirinto treinando um modelo de aprendizado por reforço no AWS RoboMaker. Saiba mais no repositório de código.
Aplicação de robótica ponta a ponta
Esta aplicação de amostra demonstra um sistema robótico de ponta a ponta com o Open Source Rover da NASA JPL. Inclui um arquivo URDF modelado a partir do popular projeto de código aberto. Saiba mais no repositório de código.
Simulação de frota de vários robôs
Aprenda como girar uma frota de robôs em simulação no Gazebo, para permitir o desenvolvimento e teste de aplicações, como planejadores de caminho e ferramentas de gerenciamento de frota.
Saiba mais no repositório de código.
Monitoramento de robôs
Monitore a integridade e as métricas operacionais de um robô em uma livraria simulada usando as Métricas do Amazon CloudWatch e os Amazon CloudWatch Logs. Saiba mais no repositório de código.
Extensões de ROS
As extensões do RoboMaker para ROS incluem serviços como o Amazon Kinesis Video Streams para transmissão de vídeo, o Amazon Rekognition para análise de imagem e vídeo, o Amazon Lex para reconhecimento de voz, o Amazon Polly para geração de fala e o Amazon CloudWatch para registro em log e monitoramento. O RoboMaker fornece cada um desses serviços de nuvem como pacotes ROS de código aberto, para a extensão de funções no robô aproveitando as APIs de nuvem, tudo em uma estrutura de software familiar.
Saiba mais sobre cada uma das extensões de serviço de nuvem no repositório de código.
Extensões de nuvem para ROS1
Kits para desenvolvedores de hardware
A criação de robôs e a inclusão de funcionalidades avançadas exigem várias escolhas dos desenvolvedores. Para eliminar incertezas e acelerar o desenvolvimento, os parceiros da AWS criaram vários kits de desenvolvimento robótico que incluem soluções completas de HW, SW pré-instalado, além de documentação e tutoriais extensivos.

Intel – UP Squared RoboMaker Developer Kit
O UP Squared RoboMaker Developer Kit é a maneira mais fácil de começar seu projeto de robótica desenvolvido pelo AWS RoboMaker. É um pacote de inicialização projetado para disponibilizar aos desenvolvedores uma maneira fácil e rápida de incluir inteligência artificial (IA) e visão computacional aos robôs. Esse kit disponibiliza um tutorial fácil sobre como criar hardware no nível do módulo e como usar serviços de nuvem para diminuir o tempo de desenvolvimento. Os desenvolvedores conseguiram incluir visão de máquina aos robôs em um único dia, bem como demonstrações robóticas operantes em apenas alguns dias. Com a experiência da Intel, da AWS e da AAEON, esse kit tem como objetivo disponibilizar aos desenvolvedores um caminho do protótipo à implantação em campo.
Esse kit apresenta uma placa UP Squared com um processador Intel® Atom™ x7-E3950, uma câmera Intel® RealSense™ D435i, uma VPU Intel® Movidius™ Myriad™ X, é totalmente compatível com os serviços de nuvem do AWS RoboMaker e estende a estrutura de software de robótica de código aberto, o Robot Operating System (ROS).
Saiba mais sobre o kit UP Squared Robomaker e faça o pedido hoje mesmo
Saiba mais sobre as parcerias com a Intel e a AAEON
.71e2a406fb99c58b15cc16feb27f4c11c20f5d62.png "NVIDIA_600x400.png")
Nvidia – JetBot AI Kit com destaque para o ROS e o AWS RoboMaker
A Nvidia acelera o desenvolvimento robótico da nuvem para a borda com o AWS RoboMaker. Agora, simulação e desenvolvimento robótico podem ser executados facilmente na nuvem e implantados em milhões de robôs e outras máquinas autônomas desenvolvidas pela Jetson. Isso inclui a plataforma de referência de código aberto da NVIDIA, o JetBot, desenvolvida pela Jetson Nano. O Jetbot é fácil de configurar e usar, é compatível com vários acessórios e inclui tutoriais interativos que mostram como usufruir de toda a capacidade da IA para seguir objetos, evitar colisões e mais. O JetBot AI Kit desenvolvido pela Nvidia com destaque para o ROS e o AWS RoboMaker inclui a placa, um chassi robótico completo, rodas e controladores junto com uma bateria e uma câmera de 8MP. Uma documentação extensiva é disponibilizada junto com o kit.
Saiba mais sobre o Jetbot Kit e faça o pedido agora
Saiba mais sobre a parceria com a Nvidia.
Qualcomm – Robotics RB3 Platform com suporte integrado para o AWS RoboMaker
A compatibilidade da Qualcomm Technologies com o AWS RoboMaker da Amazon Web Services está ajudando a transformar o conceito de inovação no setor da robótica. Com computação heterogênea de alta performance, Machine Learning no dispositivo e visão computacional, processamento de sensores de alta-fidelidade para percepção, odometria para localização, mapeamento e navegação, bem como 4G LTE e conectividade Wi-Fi, a plataforma Qualcomm Robotics RB3 disponibiliza aos desenvolvedores as ferramentas necessárias para a criação de robôs que podem acelerar a inovação, revolucionar a logística e melhorar nosso cotidiano. O suporte integrado do kit de desenvolvimento da Qualcomm Robotics RB3 para o AWS Robomaker ajuda a desenvolver, testar e implantar aplicativos de robótica inteligentes em grande escala e disponibiliza uma solução da borda para a nuvem, o que torna mais acessível a criação de aplicativos de robótica inteligentes.
Para saber mais sobre o kit Qualcomm Robotics RB3 e para comprá-lo agora
Saiba mais sobre o compromisso da Qualcomm com a inovação no setor da robótica
A documentação do desenvolvedor e um guia detalhado sobre ela estão disponíveis aqui: https://developer.qualcomm.com/project/aws-robomaker-rb3



Saiba mais sobre o AWS RoboMaker na página Perguntas frequentes.
Obtenha acesso instantâneo ao nível gratuito da AWS.