Documentation
Ressources de mondes de simulation
Nous avons créé des environnements supplémentaires que vous pouvez utiliser avec vos robots. Ils peuvent être utilisés pour tester la reconnaissance faciale, la navigation, l'évitement d'obstacles et le machine learning, et peuvent être modifiés en fonction de vos scénarios.
Mondes de maison WorldForge

AWS RoboMaker WorldForge prend en charge la génération automatique de nombreux environnements résidentiels intérieurs, avec des plans d'étages et un mobilier configurables.
Monde de petite maison
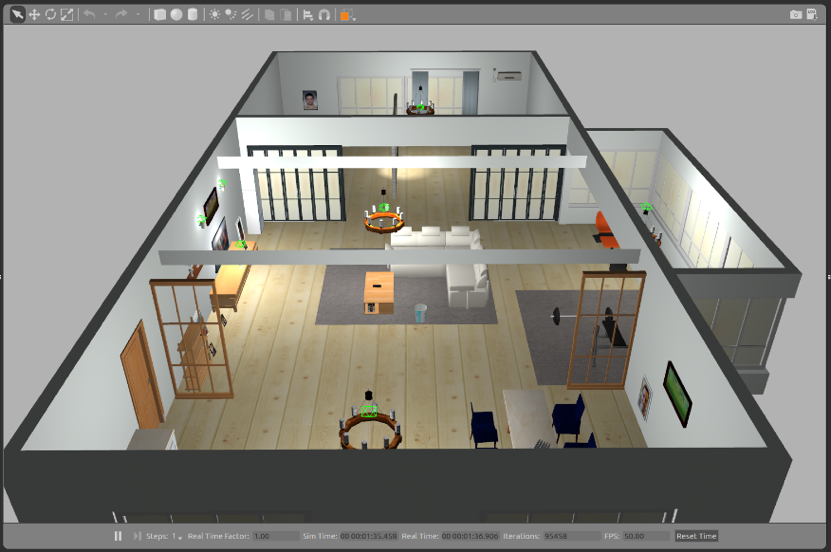
Ce monde de petite maison est à votre disposition pour utilisation. Il fournit une petite maison avec cuisine et séjour équipée d'un appareil de musculation domestique et de photos que vous pouvez personnaliser pour tester la reconnaissance d'images. Plusieurs obstacles se dressent sur l'itinéraire de votre robot.
Monde d'hôpital
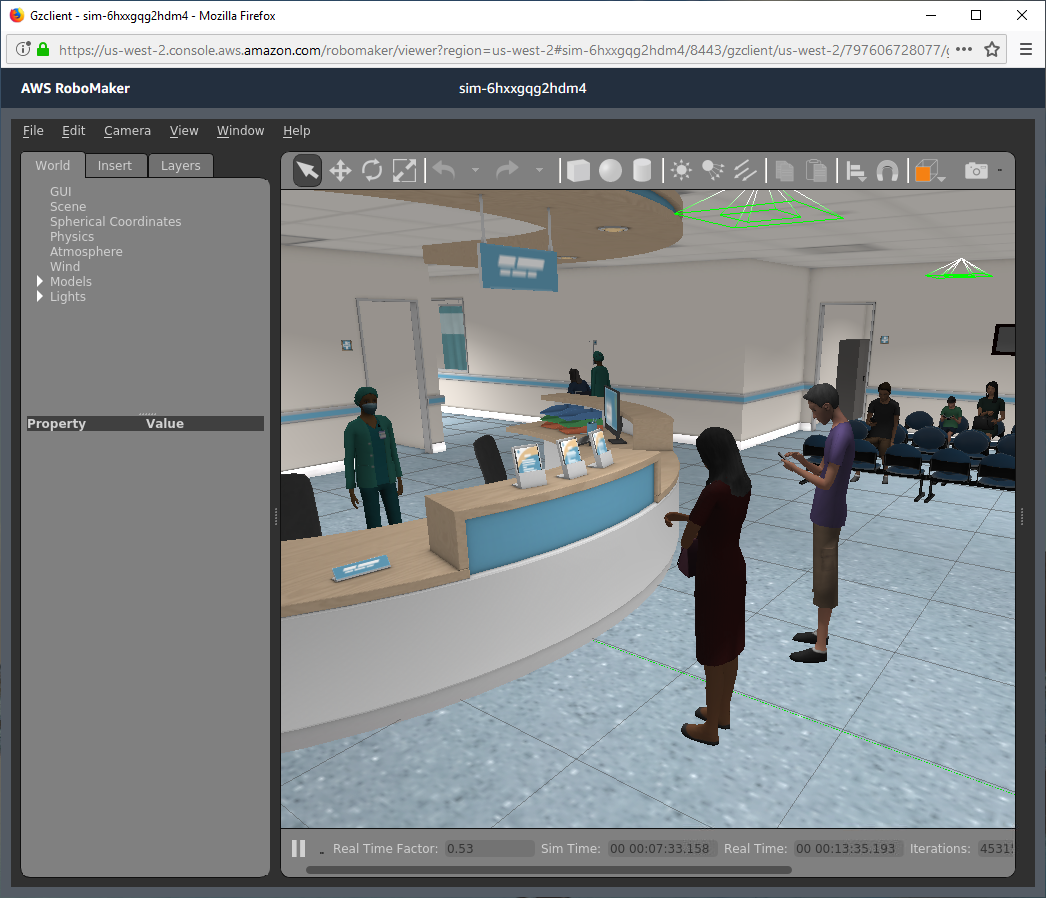
Un monde de grand hôpital avec une réception, une salle d'attente, des salles d'examens, des chambres pour patients, un local de rangement et une salle de repos du personnel.
Monde de petit entrepôt
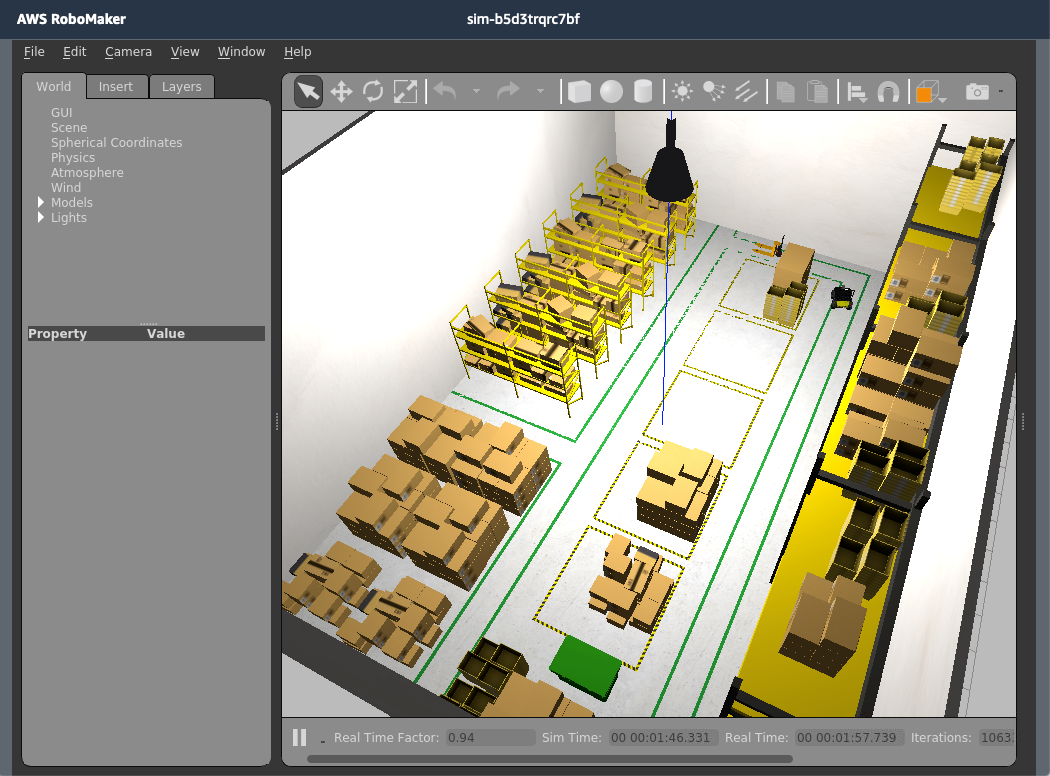
Un monde de petit entrepôt visant à tester les applications de robotique dédiées aux cas d'utilisation d'entrepôts et de logistique.
Librairie
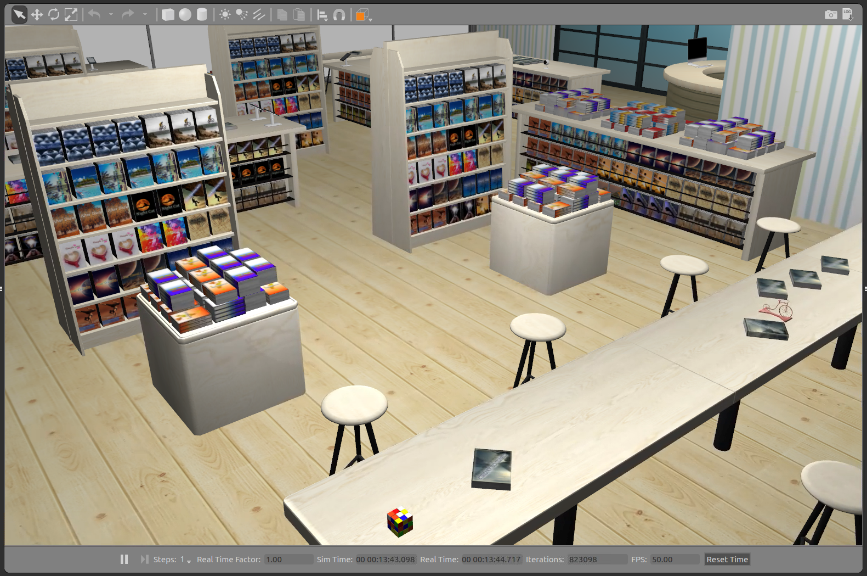
Parcourez plusieurs rayons dans cette simulation de librairie. Elle comprend plusieurs obstacles, y compris des chaises et des tables, que votre robot doit éviter.
Exemples d'applications
AWS RoboMaker comprend des exemples d'applications de robotique pour vous aider à démarrer rapidement. Celles-ci constituent le point de départ des fonctionnalités de commande vocale, de reconnaissance, de surveillance et de gestion de flotte généralement requises pour les applications de robotique intelligente. Les exemples d'applications sont livrés avec un code d'application robotique (instructions relatives aux fonctionnalités de votre robot) et un code d'application de simulation (définissant l'environnement dans lequel vos simulations seront exécutées). Cliquez ici pour commencer à utiliser les exemples.
Lancement dans RoboMaker
« Hello world »
Apprenez les bases pour structurer vos applications robotiques et vos applications de simulation, modifier le code, développer, lancer de nouvelles simulations et déployer des applications sur des robots. Commencez par utiliser un modèle de projet simple incluant un robot dans un monde de simulation vide.
Navigation
Accédez à un robot pour parcourir les emplacements dédiés dans un environnement de librairie simulée. Apprenez à générer de manière procédurale une carte d'occupation pour les environnements Gazebo à l'aide d'un plugin de génération cartographique.
Lancement dans GitHub
Lanceur de simulation
Lancez des simulations par lots dans AWS RoboMaker avec Code Pipeline et Step Functions. En savoir plus dans le référentiel de code.
Navigation du robot
Créez une carte et déplacez le robot jusqu'à un emplacement défini dans le simulateur RoboMaker. En savoir plus dans le référentiel de code.
Apprentissage par renforcement
Échappez-vous d'un monde de labyrinthe en entraînant un modèle d'apprentissage par renforcement sur AWS RoboMaker. En savoir plus dans le référentiel de code.
Application de robotique de bout en bout
Cet exemple d'application illustre un système de robotique de bout en bout utilisant le rover open source du NASA JPL. Il inclut un fichier URDF modelé après le développement du célèbre projet open source. En savoir plus dans le référentiel de code.
Simulation de flotte de robots
Découvrez comment lancer une flotte de robots en simulation dans Gazebo en vue de développer et de tester des applications telles que les planificateurs de trajets et les outils de gestion de flotte.
En savoir plus dans le référentiel de code.
Surveillance de robot
Surveillez les métriques d'intégrité et les métriques opérationnelles d'un robot dans une librairie simulée en utilisant Amazon CloudWatch Metrics et Amazon CloudWatch Logs. En savoir plus dans le référentiel de code.
Extensions ROS
Les extensions cloud RoboMaker pour ROS incluent des services comme Amazon Kinesis Video Streams pour le streaming vidéo, Amazon Rekognition pour l'analyse d'images et de vidéos, Amazon Lex pour la reconnaissance vocale, Amazon Polly pour la génération de parole et Amazon CloudWatch pour la journalisation et la surveillance. RoboMaker fournit chacune de ces extensions de service de cloud computing sous forme de packages ROS open source. Vous pouvez ainsi étendre les fonctions de votre robot en tirant parti des API de cloud, le tout dans un cadre logiciel familier.
Consultez le référentiel de code pour en savoir plus sur chacune de ces extensions de services cloud.
Extensions cloud ROS1
Kits de développeur matériel
La création de robots et l'ajout de fonctionnalités avancées impliquent de nombreux choix pour les développeurs. Pour éliminer l’incertitude et accélérer le développement, les partenaires AWS ont créé de nombreux kits de développement robotiques comprenant des solutions HW complètes, des SW pré-installés et une documentation ainsi que des didacticiels complets.

Intel – UP Squared RoboMaker Developer Kit
Le kit UP Squared RoboMaker Developer Kit est le moyen le plus simple de bien démarrer votre projet robotique avec AWS RoboMaker. Il s’agit d’un pack de démarrage conçu pour que les développeurs puissent ajouter facilement et rapidement l’intelligence artificielle (IA) et la vision à leurs robots. Ce kit comprend un didacticiel clair pour créer le matériel depuis le niveau du module et utiliser les services cloud afin de réduire les délais de développement. Les développeurs ont pu ajouter la vision machine à leurs robots en un jour et effectuer des démonstrations robotiques en seulement quelques jours. Grâce à l’expertise d’Intel, d’AWS et d’AAEON, ce kit a pour but de fournir aux développeurs une voie directe entre le prototype et le déploiement sur le terrain.
Le kit comprend une carte UP Squared avec un processeur Intel® Atom™ x7-E3950, une caméra Intel® RealSense™ D435i, un VPU Intel® Movidius™ Myriad™ X. De plus, il est parfaitement compatible avec les services cloud d’AWS RoboMaker et étend le cadre logiciel robotique open source Robot Operating System (ROS).
En savoir plus sur le kit UP Squared Robomaker et le commander dès aujourd’hui
En savoir plus sur les partenariats avec Intel et Aaeon
.71e2a406fb99c58b15cc16feb27f4c11c20f5d62.png "NVIDIA_600x400.png")
Nvidia – JetBot AI Kit avec ROS et AWS RoboMaker
Nvidia accélère le développement robotique du cloud vers la périphérie avec AWS RoboMaker. La simulation et le développement robotiques peuvent désormais se faire en toute simplicité dans le cloud et être déployés sur des millions de robots et autres machines autonomes optimisées par Jetson. Le kit comprend la plate-forme de référence open source de NVIDIA, JetBot, optimisée par Jetson Nano. Jetbot est facile à configurer et à utiliser, est compatible avec de nombreux accessoires et comprend des didacticiels interactifs vous montrant comment maîtriser l’IA afin de suivre des objets, éviter les collisions et plus encore. Le JetBot AI Kit optimisé par Nvidia et équipé de ROS et AWS RoboMaker comprend la carte, un châssis de robot complet, des roues et des télécommandes ainsi qu’une batterie et une caméra 8MP. Une documentation complète est fournie avec le kit.
En savoir plus sur le kit Jetbot et le commander dès aujourd’hui
En savoir plus sur le partenariat avec Nivida.
Qualcomm – Plate-forme Robotics RB3 avec prise en charge intégrée pour AWS RoboMaker
La prise en charge par Qualcomm Technologies du service AWS RoboMaker d’Amazon Web Services aide à transformer l’innovation dans la robotique. Grâce à l’informatique hétérogène hautes performances, au machine learning et à la vision machine embarqués, au traitement de détection haute fidélité pour la perception, à l’odométrie pour la localisation, le mappage et la navigation, et aux connectivités 4G LTE et Wi-Fi, la plate-forme Qualcomm Robotics RB3 apporte aux développeurs les outils pour créer des robots capables d’accélérer l’innovation, de révolutionner la logistique et d’améliorer la vie au quotidien. Le kit de développement de Qualcomm Robotics RB3 intègre la prise en charge pour AWS Robomaker pour favoriser le développement, le test et le déploiement d’applications robotiques intelligentes à grande échelle. Il fournit également une solution périphérie-cloud pour rendre la création d’applications robotiques intelligentes plus accessible.
En savoir plus sur le kit Qualcomm Robotics RB3 et le commander dès aujourd’hui
En savoir plus sur l’engagement de Qualcomm envers l’innovation dans la robotique
Vous trouverez la documentation pour les développeurs ainsi qu’une documentation détaillée ici : https://developer.qualcomm.com/project/aws-robomaker-rb3.


