시뮬레이션 월드 자산
AWS에서는 로봇과 함께 사용할 수 있는 환경을 추가로 생성했습니다. 이러한 환경은 얼굴 인식, 탐색, 장애물 회피, 기계 학습을 테스트하는 데 사용할 수 있으며, 특정 시나리오에 맞게 수정할 수도 있습니다.
WorldForge 주택 월드

AWS RoboMaker WorldForge는 구성 가능한 평면도와 가구가 완비된 다양한 실내 가정 환경의 자동 생성을 지원합니다.
소형 주택 월드
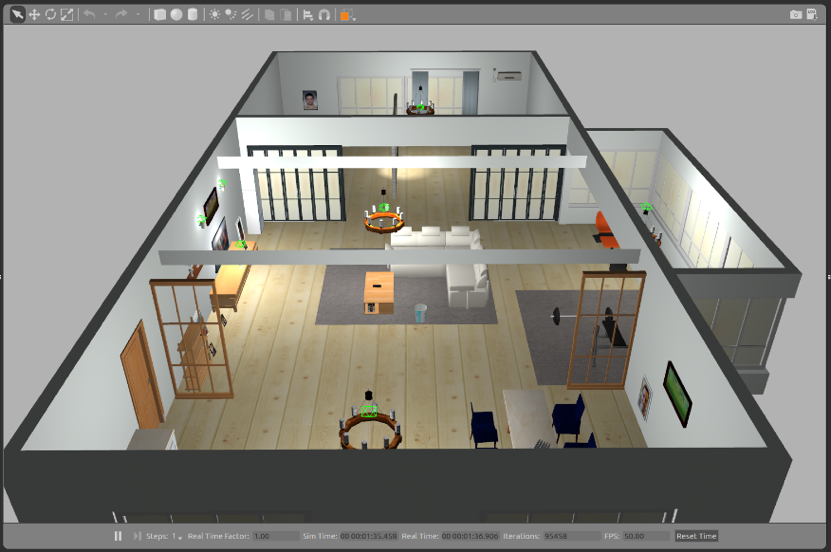
추가적으로 이 간단한 가정 월드를 사용할 수 있습니다. 이 샘플 월드는 이미지 인식을 테스트하기 위해 사용자 지정할 수 있는 주방, 거실, 홈 짐, 그림이 있는 소형 주택을 제공합니다. 이 공간에는 로봇이 탐색할 많은 장애물이 있습니다.
샘플 애플리케이션
AWS RoboMaker에는 빠른 시작을 지원하는 샘플 로보틱스 애플리케이션이 포함되어 있습니다. 이러한 애플리케이션을 토대로, 일반적으로 지능형 로보틱스 애플리케이션에 필요한 음성 명령, 인식, 모니터링 및 플릿 관리 기능을 시작할 수 있습니다. 샘플 애플리케이션에는 로보틱스 애플리케이션 코드(로봇 기능 지침)와 시뮬레이션 애플리케이션 코드(시뮬레이션이 실행될 환경 정의)가 제공됩니다. 여기에서 샘플을 시작할 수 있습니다.
RoboMaker에서 시작
Hello World
로봇 애플리케이션 및 시뮬레이션 애플리케이션을 구조화하고, 코드를 편집하고, 새 시뮬레이션을 구축 및 실행하고 애플리케이션을 로봇에 배포하는 방법에 관한 기본 사항을 자세히 알아보십시오. 빈 시뮬레이션 월드에서 로봇이 포함된 기본 프로젝트 템플릿으로 시작하십시오.
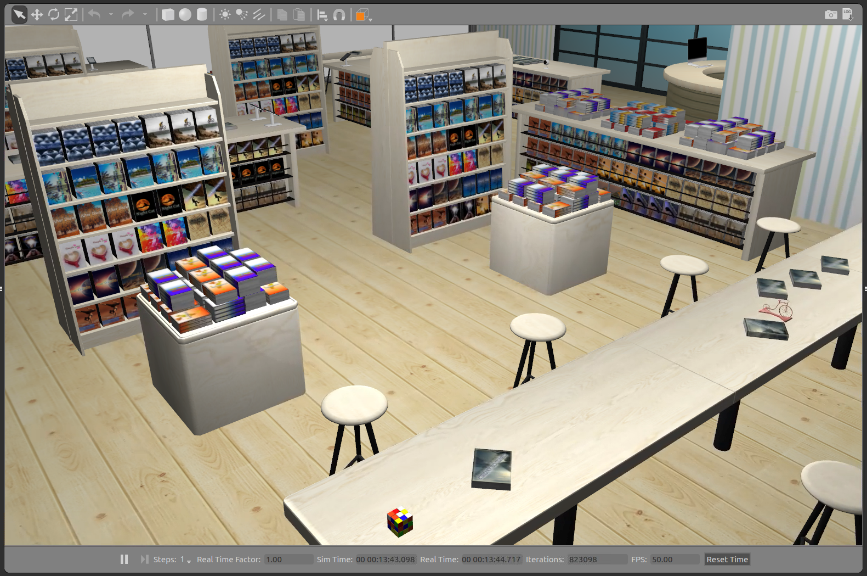
탐색
시뮬레이션 북스토어 세계에서 지정된 위치로 로봇을 탐색합니다. 맵 생성 플러그 인을 이용하여 모든 Gazebo 세계에 대한 점유 맵을 절차적으로 생성하는 방법을 알아보세요.
GitHub에서 시작
시뮬레이션 런처
Code Pipeline 및 Step Functions를 사용하여 AWS RoboMaker에서 배치 시뮬레이션을 시작합니다. 코드 리포지토리에서 자세히 알아보십시오.
로봇 탐색
RoboMaker 시뮬레이터에서 맵을 생성하고 로봇을 지정된 위치로 이동합니다. 코드 리포지토리에서 자세히 알아보십시오.
강화 학습
AWS RoboMaker에서 강화 학습 모델을 훈련하여 미로 세계에서 탈출하십시오. 코드 리포지토리에서 자세히 알아보십시오.
엔드 투 엔드 로보틱스 애플리케이션
이 샘플 애플리케이션은 NASA JPL의 Open Source Rover를 사용하는 엔드 투 엔드 로보틱스 시스템을 보여 줍니다. 여기에는 인기있는 오픈 소스 프로젝트를 모델로 한 URDF 파일이 포함되어 있습니다. 코드 리포지토리에서 자세히 알아보십시오.
멀티 로봇 플릿 시뮬레이션
경로 플래너 및 플릿 관리 도구와 같은 애플리케이션의 개발 및 테스트를 지원하기 위해 Gazebo의 시뮬레이션 환경에서 로봇 플릿을 실행하는 방법을 알아보십시오.
코드 리포지토리에서 자세히 알아보세요.
로봇 모니터링
Amazon CloudWatch Metrics 및 Amazon CloudWatch Logs를 사용하여 시뮬레이션된 북스토어에서 로봇의 상태 및 운영 지표를 모니터링합니다. 코드 리포지토리에서 자세히 알아보세요.
ROS 확장 프로그램
ROS용 RoboMaker 클라우드 확장 프로그램에는 Amazon Kinesis Video Streams(동영상 스트리밍), Amazon Rekognition(이미지 및 동영상 분석), Amazon Lex(음성 인식), Amazon Polly(음성 생성) 및 Amazon CloudWatch(로깅 및 모니터링) 등의 서비스가 포함됩니다. RoboMaker는 이러한 클라우드 서비스를 오픈 소스 ROS 패키지로 제공하므로, 모든 클라우드 API를 익숙한 소프트웨어 프레임워크에서 활용하여 로봇의 기능을 확장할 수 있습니다.
코드 리포지토리에 있는 각 클라우드 서비스 확장 프로그램에 대해 자세히 알아보세요.
ROS1 클라우드 확장 프로그램
하드웨어 개발자 키트
로봇을 구축하고 고급 기능을 추가하려면 개발자가 많은 사항을 선택해야 합니다. AWS 파트너는 불확실성을 없애고 개발 속도를 높이기 위해 완전한 하드웨어 솔루션, 사전 설치된 소프트웨어 그리고 포괄적인 설명서 및 자습서가 포함된 다양한 로보틱스 개발 키트를 제작했습니다.

Intel - UP Squared RoboMaker Developer Kit
UP Squared RoboMaker Developer Kit를 활용하면 AWS RoboMaker 기반의 로보틱스 프로젝트를 가장 손쉽게 시작할 수 있습니다. 이 시작 패키지를 사용하는 개발자는 로봇에 인공 지능(AI)과 비전을 쉽고 빠르게 추가할 수 있습니다. 이 키트에는 모듈 레벨에서 하드웨어를 구축하는 방법과 클라우드 서비스를 통해 개발 시간을 단축하는 방법이 명확하게 정리된 자습서가 포함되어 있습니다. 개발자는 하루 만에 로봇에 기계 비전을 추가하고 로보틱스 데모를 단 며칠 만에 작동할 수 있습니다. Intel, AWS, AAEON의 전문성이 집약된 이 키트는 프로토타입 제작부터 현장 배포에 이르기까지 개발자를 지원하기 위해 마련되었습니다.
이 키트는 Intel® Atom™ 프로세서 x7-E3950, Intel® RealSense™ D435i 카메라, Intel® Movidius™ Myriad™ X VPU가 탑재된 UP Squared 보드를 포함하며, AWS RoboMaker 클라우드 서비스와 완벽하게 호환되고, 오픈 소스 로보틱스 소프트웨어 프레임워크인 오픈 소스 로봇 운영 체제(ROS)를 확장합니다.
UP Squared Robomaker 키트에 대해 자세히 알아보고 지금 바로 주문
Intel 및 Aaeon과의 파트너십에 대해 자세히 알아보기
.71e2a406fb99c58b15cc16feb27f4c11c20f5d62.png "NVIDIA_600x400.png")
Nvidia - ROS 및 AWS RoboMaker 기반의 JetBot AI Kit
Nvidia는 AWS RoboMaker를 통해 클라우드에서 엣지로의 로보틱스 개발을 가속화합니다. 이제는 로보틱스 시뮬레이션 및 개발을 클라우드에서 손쉽게 수행하고 수백만 대의 로봇과 Jetson을 기반으로 하는 그 밖의 자율 운영 기계에 배포할 수 있습니다. 여기에는 Jetson Nano를 기반으로 하는 NVIDIA의 오픈 소스 참조 플랫폼인 JetBot이 포함됩니다. Jetbot은 손쉽게 설정 및 사용이 가능하며, 많은 액세서리와 호환되고, AI의 성능을 바탕으로 물체를 추적하고, 충돌을 피하는 등의 방법을 보여 주는 대화형 자습서를 포함합니다. ROS 및 AWS RoboMaker와 함께 Nvidia를 기반으로 하는 JetBot AI Kit에는 완전한 로봇 섀시, 휠, 컨트롤러와 함께 배터리 및 8MP 카메라를 갖춘 보드가 포함되어 있습니다. 또한 키트와 함께 포괄적인 설명서가 제공됩니다.
Jetbot 키트에 대해 자세히 알아보기 지금 바로 주문
Nivida와의 파트너십에 대해 자세히 알아보십시오.
Qualcomm - AWS RoboMaker에 대한 지원이 통합된 Robotics RB3 플랫폼
Qualcomm Technologies는 Amazon Web Services의 AWS RoboMaker를 지원하기로 결정하여 로보틱스 부문의 혁신을 지원하고 있습니다. 고성능 이기종 컴퓨팅, 온디바이스 기계 학습 및 컴퓨터 비전, 인지를 위한 고충실도 센서 처리, 현지화, 매핑 및 탐색을 위한 주행거리계, 4G LTE 및 Wi-Fi 연결 기능을 갖춘 Qualcomm Robotics RB3 플랫폼은 개발자가 혁신 속도를 높이고, 물류를 혁신하고, 일상의 삶을 개선할 수 있는 로봇을 제작할 수 있게 해 줍니다. Qualcomm Robotics RB3 개발 키트는 AWS RoboMaker에 대한 지원이 통합되어 지능형 로보틱스 애플리케이션의 개발, 테스트 및 배포를 대규모로 지원하고, 엣지 투 클라우드 솔루션을 통해 지능형 로보틱스 애플리케이션을 더 손쉽게 구축할 수 있게 해 줍니다.
Qualcomm Robotics RB3 키트에 대해 자세히 알아보고 지금 바로 구입
Qualcomm의 로보틱스 혁신 노력에 대해 알아보기
개발자 설명서 및 포괄적인 단계별 개발자 설명서는 다음 웹 페이지에서 확인할 수 있습니다. https://developer.qualcomm.com/project/aws-robomaker-rb3


