模擬世界資產
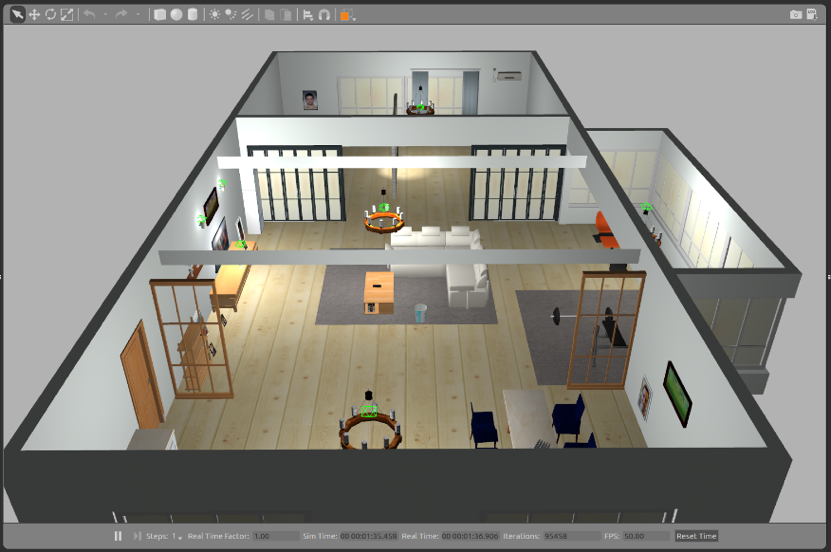
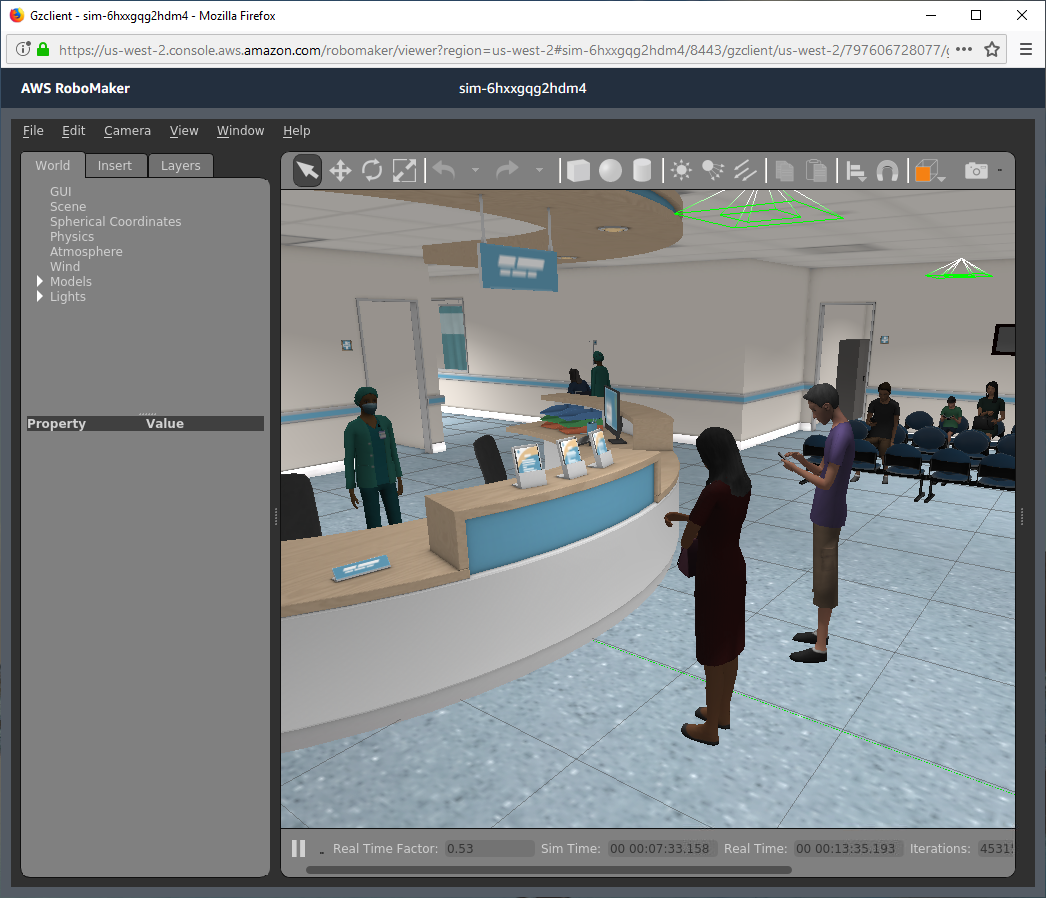
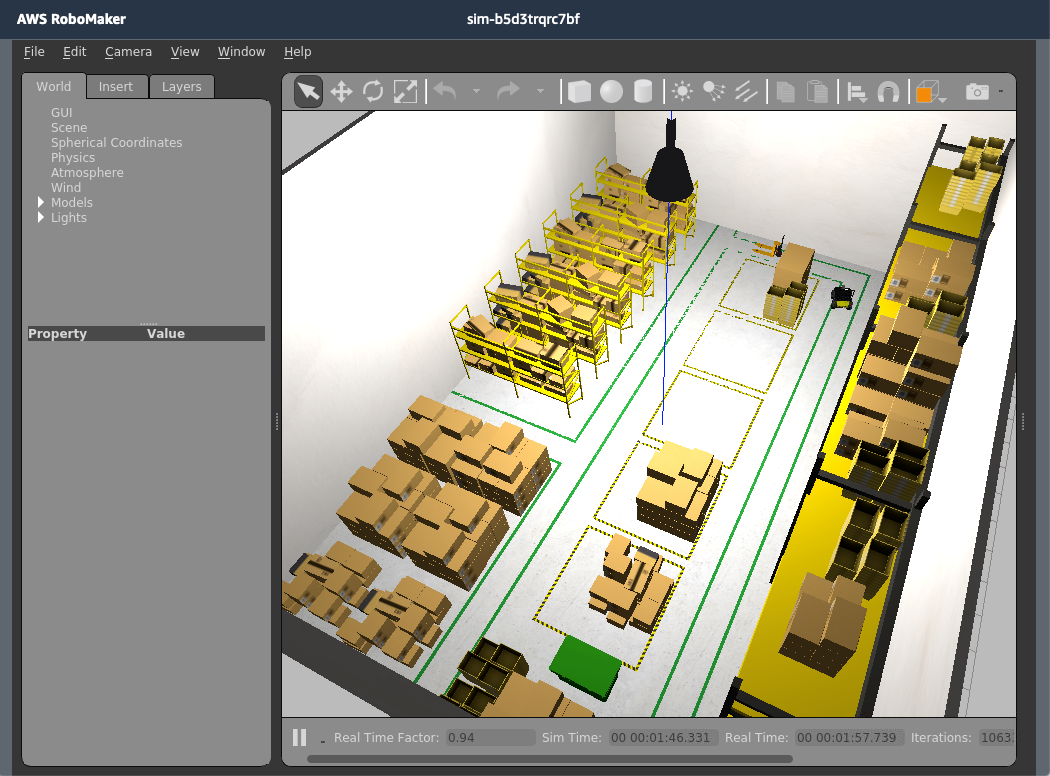
我們已建立其他的環境供您搭配機器人使用。這些環境可用來測試臉部辨識、尋找方向、避開障礙物、機器學習,並可針對您的案例需求進行修改。

範例應用程式
AWS RoboMaker 包含範本機器人應用程式,可協助您快速開始使用。這些應用程式提供智慧型機器人應用程式一般所需之語音命令、辨識、監控和叢集管理功能的基礎。範本應用程式隨附機器人應用程式的程式碼 (機器人功能的各項指示) 和模擬應用程式的程式碼 (定義模擬作業執行的環境)。您可以在這裡開始使用範例。
在 RoboMaker 中啟動
Hello world
了解各項基礎知識,以學習如何建立機器人應用程式和模擬應用程式、編輯程式碼、建立、啟動新模擬以及將應用程式部署到機器人。從基本專案範本開始,包括空白模擬世界中的機器人。
導覽
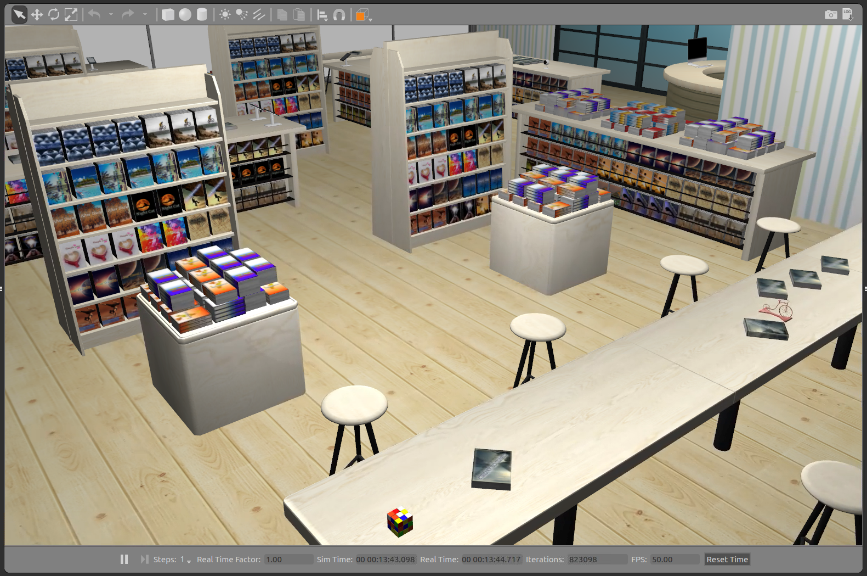
在模擬書店世界中導覽到機器人到指定位置。了解如何使用地圖產生外掛程式按程序為任何 Gazebo 世界產生佔用地圖。
在 GitHub 中啟動
模擬啟動器
使用 Code Pipeline 和 Step Functions,在 AWS RoboMaker 中啟動批次模擬。要進一步了解,請瀏覽程式碼儲存庫。
機器人導覽
建立地圖並將機器人導覽至 RoboMaker 模擬器中的指定位置。 要進一步了解,請瀏覽程式碼儲存庫。
強化學習
通過在 AWS RoboMaker 上訓練強化學習模型來逃離迷宮世界。要進一步了解,請瀏覽程式碼儲存庫。
端對端機器人應用程式
此範例應用程式示範了使用 NASA JPL 開放原始碼漫遊器的端對端機器人系統。其包含根據流行的開放原始碼專案建模的 URDF 檔案。要進一步了解,請瀏覽程式碼儲存庫。
多機器人機群模擬
了解如何在 Gazebo 中模擬加速機器人機群,以實現路徑規劃器和機群管理工具等應用程式的開發和測試。
要進一步了解,請瀏覽程式碼儲存庫。
機器人監控
使用 Amazon CloudWatch 指標和 Amazon CloudWatch Logs 監控模擬書店中的機器人運作狀況和操作指標。要進一步了解,請瀏覽程式碼儲存庫。
ROS 擴充功能
適用於 ROS 的 RoboMaker 雲端擴充功能包含以下服務:用於影片串流的 Amazon Kinesis Video Streams、分析影像和影片的 Amazon Rekognition、用於語音辨識的 Amazon Lex、用於產生語音的 Amazon Polly,以及用於記錄和監控的 Amazon CloudWatch。RoboMaker 以開放原始碼 ROS 套件的形式提供每項雲端服務,因此您可以在熟悉的軟體架構中利用雲端 API 擴展機器人的各項功能。
進一步了解程式碼儲存庫中的每項雲端服務擴充功能。
ROS1 雲端擴充功能
硬體開發人員套件
建立機器人和新增進階功能時,開發人員需要做出很多選擇。為了消除不確定性並加快開發速度,AWS 合作夥伴建立了許多機器人開發套件,其中包括完整的硬體解決方案、預先安裝的軟體以及大量文件和教學。

Intel – UP Squared RoboMaker Developer Kit
UP Squared RoboMaker Developer Kit 是開始進行採用 AWS RoboMaker 技術的機器人專案最簡便的方法。這是一個入門套件,旨在為開發人員提供一種快速簡便的方法,讓他們在機器人中新增人工智慧 (AI) 和視覺能力。該套件提供詳細的教學,說明如何從模組層級建立硬體以及如何使用雲端服務縮短開發時間。開發人員能夠在一天內將機器視覺新增到機器人,並在短短幾天內完成機器人示範。該套件擁有來自 Intel、AWS 和 AAEON 的專業知識,旨在為開發人員提供從原型到實際部署的途徑。
該套件的 UP Squared 板搭載 Intel® Atom™ 處理器 x7-E3950、Intel® RealSense™ D435i 攝影機、Intel® Movidius™ Myriad™ X VPU,並與 AWS RoboMaker 雲端服務完全相容,而且能擴展開放原始碼機器人技術軟體架構 Robot Operating System (ROS)。
了解 UP Squared Robomaker 套件並立即訂購
進一步了解與 Intel 和 Aaeon 的合作關係
.71e2a406fb99c58b15cc16feb27f4c11c20f5d62.png "NVIDIA_600x400.png")
Nvidia – JetBot AI Kit (含 ROS 和 AWS RoboMaker)
Nvidia 使用 AWS RoboMaker 加快從雲端到邊緣的機器人開發。機器人模擬和開發現在可以輕鬆地在雲端完成,也可以部署到數百萬台機器人和採用 Jetson 技術的其他自主機器。其中包括採用 Jetson Nano 技術的 NVIDIA 開放原始碼參考平台 JetBot。Jetbot 非常容易設定和使用,與許多配件相容,並且提供互動式教學,為您示範如何利用 AI 的力量跟隨物體,防止碰撞等等。JetBot AI Kit 採用 Nvidia 技術及 ROS 和 AWS RoboMaker,內含主機板、完整的機器人機箱、輪子和控制器,以及電池和 8MP 攝影機。該套件隨附各種相關文件。
了解 Jetbot 套件並立即訂購
進一步了解與 Nivida 的合作關係。
Qualcomm – Robotics RB3 Platform 含 AWS RoboMaker 整合支援
Qualcomm Technologies 對 Amazon Web Services 的 AWS RoboMaker 支援,有助於轉型機器人的創新技術。Qualcomm Robotics RB3 平台具有高效能的異質運算、裝置上的機器學習和電腦視覺、用於感知的高保真感應器處理、用於定位、地圖和導航的里程計以及 4G LTE 和 Wi-Fi 連接,為開發人員提供多種工具,以建立有助於加速創新、革新物流以及改善日常生活的機器人。Qualcomm Robotics RB3 開發套件含 AWS Robomaker 整合支援,有助於大規模開發、測試和部署智慧型機器人應用程式,並提供從邊緣到雲端的解決方案,讓開發人員可以輕鬆設計各種智慧型機器人應用程式。
進一步了解 Qualcomm Robotics RB3 套件並立即購買
了解 Qualcomm 為機器人創新所做的努力
如需開發人員文件和詳盡的逐步開發人員文件,請瀏覽:https://developer.qualcomm.com/project/aws-robomaker-rb3


