AWS Open Source Blog
Category: Robotics

AWS DeepRacer is now open source and ready to hit the road with ROS 2
Reinforcement learning (RL) has become one of the most popular machine learning techniques for training robots in simulation. RL enables models to learn complex behaviors without labeled training data and allows the models to make short-term decisions while optimizing for longer-term goals. AWS DeepRacer offers an autonomous 1/18th scale race car driven by a reinforcement […]

Building the future of robots development with ROS 2
Few things have changed the world more than the internet, and at the heart of the internet is the open source LAMP stack. LAMP, short for Linux, Apache, MySQL, and PHP, enabled developers to build new, interactive web experiences that have changed the way we shop, communicate, learn, and more. In robotics, we’re on the […]

What’s new with the open source Robot Operating System in 2020
Not many people can say their job revolves around robotics and community, but Katherine Scott is one of them. Katherine Scott—or Kat, as her teammates call her—is a Developer Advocate at Open Robotics, an organization that develops open source software for use with robotics. Part of her job is helping developers stay focused on development […]
re:Cap part three – open source at re:Invent 2019
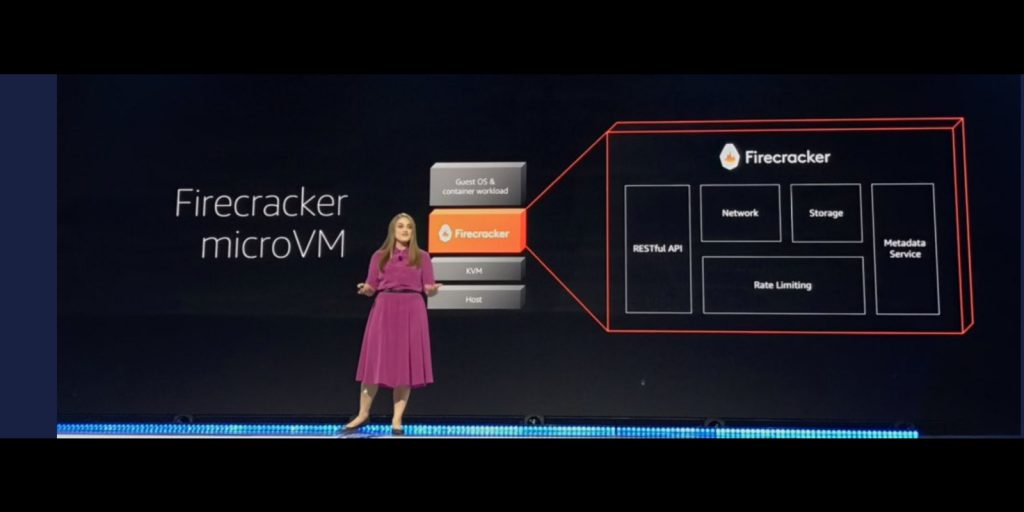
Wrapping up our final summary, we kick off with a roundup of the open source updates in the area of compute and emerging technologies. We start with a great explanation of Fargate on Firecracker from Clare Ligouri during Werner Vogel’s keynote, and proceed to a broad selection of the container sessions and workshops that ran […]

Robotics at re:Invent 2019
For the first time, at re:Invent 2019, we will have dedicated Robotics and Open Source tracks! We’re excited to be working closely with the open source community to make robotics easier than ever for everyone. Throughout the week, we are offering a diverse variety of content and learning opportunities about the open source Robot Operating System […]

How AWS is helping to open source the future of robotics
Our robot overlords may not take over anytime soon, but when they do, they’ll likely be running ROS. ROS, or Robot Operating System, was launched over a decade ago to unite developers in building “a collection of tools, libraries, and conventions that aim to simplify the task of creating complex and robust robot behavior across […]

AWS RoboMaker’s CloudWatch ROS nodes with offline support
Developers and roboticists alike use a variety of tools to monitor and diagnose remote systems. One such tool is Amazon CloudWatch, a monitoring and management service that enables users to collect performance and operational data in the form of logs and metrics from a single platform. AWS RoboMaker‘s CloudWatch extensions are open source Robot Operating […]

ROS by the Bay Meetup
by Camilo Buscaron Last month, AWS hosted at our East Palo Alto offices the second ROS by the Bay Meetup organized by Open Robotics. ROS is an open source set of software libraries and tools that which helps developers build robot applications. We were excited to support this growing community of open source developers, with over […]

Building and Bundling a ROS Application for AWS RoboMaker
中文版 – Twelve months ago, we started working on AWS RoboMaker, a cloud robotics service. One of the biggest questions looming over us was: How are we going to make it easy to run any ROS application on our service? Robot applications are a large mix of different packages with numerous dependencies. When simulation is […]
The Open Source Robot Operating System (ROS) and AWS RoboMaker
中文版 “There are certain problems within the robotics community that, at this point, are well enough solved that everybody kind of understands and more or less recognizes that this is the best approach to solve that problem. And so, wherever we can in the ROS community, we take those algorithms, implement them in open source […]