AWS Robotics Blog
Category: *Post Types
Containerize robot applications for testing in the cloud and deploying at the edge
Robotics developers use the open source Robot Operating System (ROS) to build distributed and complex applications for their robots. Robot developers benefit from using the cloud for building, training, and testing robotic applications at scale with Continuous integration and continuous deployment (CI/CD) workflows for physical testing and updates pushed over the air. Containers provide a […]

Build and simulate a Mini Pupper robot in the cloud without managing any infrastructure
AWS RoboMaker provides a comprehensive cloud solution for robotics development. It features fully managed simulation capabilities built on scalable infrastructure. In this post, we use a simple Mini Pupper sample application to demonstrate how to use AWS RoboMaker for robotics application development, testing, and simulation.

How Boston Dynamics and AWS use mobility and computer vision for dynamic sensing
AWS and Boston Dynamics are working together to bring dynamic sensing to life, taking sensors where they’re needed through mobile robots and using AWS tools to process the data into critical insights for industrial teams. AWS IoT Greengrass 2.0 is an open-source edge runtime that is compatible with Spot’s compute payloads and enables delivery and execution of applications or ML models on the robot. AWS IoT Greengrass also enables Spot to send data back to the cloud with flexibility for varied use-cases.

Accelerating the pace of innovation with robotics startups and AWS
To support the robotics start-up community, AWS invited early-stage robotics startups for a three-day program to learn and build with AWS Robotics business and technical experts. The AWS Robotics Startup Acceleration program was held virtually, August 17-August 19, 2021 with founders and technical executives from robotics startups.

AWS RoboMaker now supports ROS2 Foxy Fitzroy featuring Navigation2
AWS RoboMaker now supports ROS 2 Foxy Fitzroy (Foxy), enabling developers to use Foxy during development or simulation. In ROS 2, Navigation2 (Nav2) is the second generation of the ROS Navigation software stack, enabling robots to move autonomously from point A to B. Nav2 includes new features not previously available in ROS that help developers improve the performance of their robot’s navigation and enables new robotics use cases within logistics, hospitals, or security. In this blog, I review Nav2 features and architecture, and show you how to use Nav2 in AWS RoboMaker.
AWS announces a new developer desktop feature within the AWS RoboMaker IDE
Amazon Web Services (AWS) has released a new Integrated Developer Environment (IDE) desktop feature within AWS RoboMaker. This new feature allows iterative development and testing of your robotics algorithm code through your web browser, speeding up your development time.

Roomie uses AWS RoboMaker to scale custom robotics development
Roomie leverages AWS and open-source tools to build and deploy a wide variety of custom robot solutions for their customers across Mexico and Latin America.
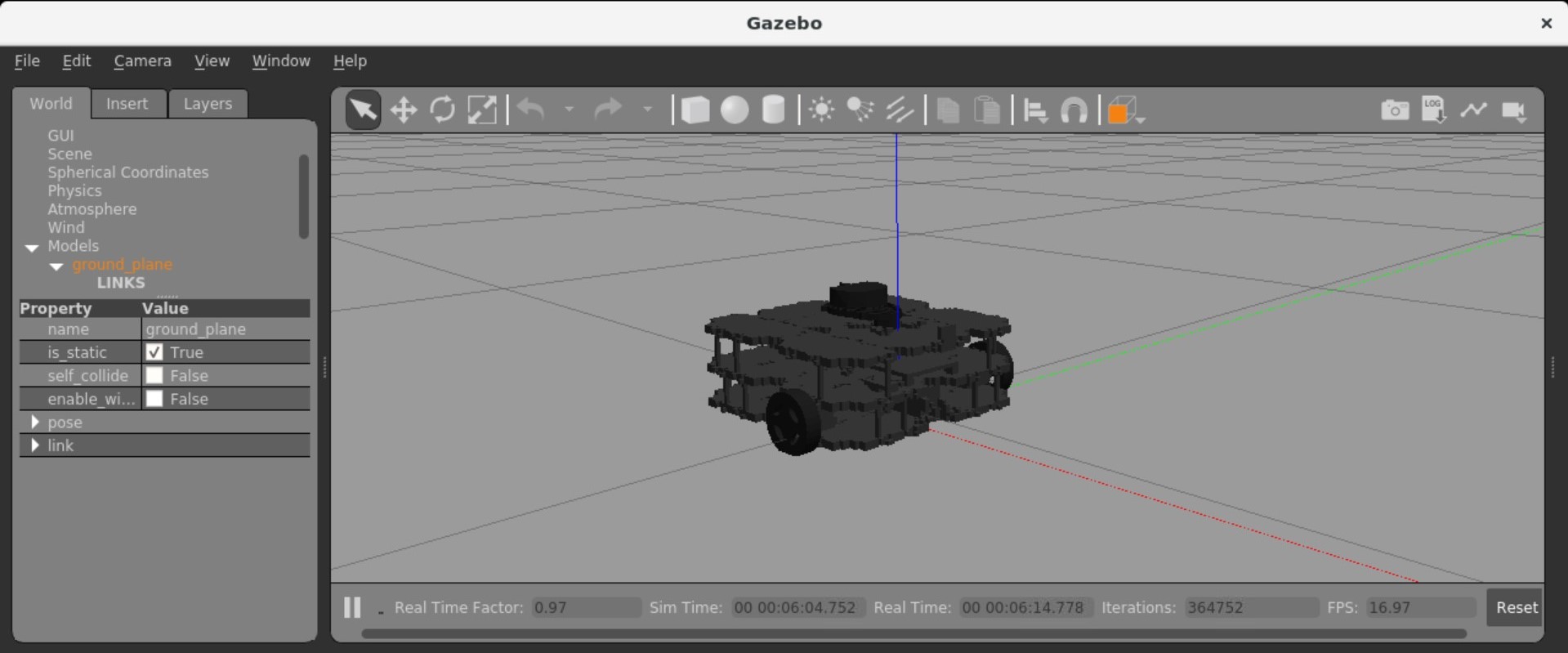
Clearpath enables robotics prototyping with one-click simulations using AWS
AWS helps Clearpath Robotics make it easier for their customers like Boston Dynamics to prototype robotics applications in simulation. With the AWS CloudFormation Launch Stack, Clearpath’s customers can launch Gazebo simulations in AWS RoboMaker with a click of a button.

Introducing upload configurations for AWS RoboMaker Simulation
Introduction AWS RoboMaker now supports data upload configurations within simulation jobs. This capability allows developers to define the type of simulation data they want to upload, choose the upload behavior, and reliably upload the simulation data to their preferred Amazon S3 output location. This functionality makes it easier for developers to review or analyze application […]

Guide To AWS Robotics at re:Invent 2020
Join AWS Robotics experts and innovative robotics companies at re:Invent this year to learn how to advance and speed up efforts to build robotics applications.