AWS Robotics Blog

AWS RoboMaker now supports ROS2 Foxy Fitzroy featuring Navigation2
AWS RoboMaker now supports ROS 2 Foxy Fitzroy (Foxy), enabling developers to use Foxy during development or simulation. In ROS 2, Navigation2 (Nav2) is the second generation of the ROS Navigation software stack, enabling robots to move autonomously from point A to B. Nav2 includes new features not previously available in ROS that help developers improve the performance of their robot’s navigation and enables new robotics use cases within logistics, hospitals, or security. In this blog, I review Nav2 features and architecture, and show you how to use Nav2 in AWS RoboMaker.
AWS announces a new developer desktop feature within the AWS RoboMaker IDE
Amazon Web Services (AWS) has released a new Integrated Developer Environment (IDE) desktop feature within AWS RoboMaker. This new feature allows iterative development and testing of your robotics algorithm code through your web browser, speeding up your development time.

Improving control of diagnostic tools in simulations with AWS RoboMaker tool configuration
AWS RoboMaker released a tool configuration feature that allows customers to improve control of diagnostic tools with their simulations. This new level of control allows users to configure which default tools to run, change the commands used to run them, and add additional tools. In this blog, we walk through two procedures. First, we walk through how to add a configuration to an existing tool and, second, how to add a new tool to your simulation.

Roomie uses AWS RoboMaker to scale custom robotics development
Roomie leverages AWS and open-source tools to build and deploy a wide variety of custom robot solutions for their customers across Mexico and Latin America.
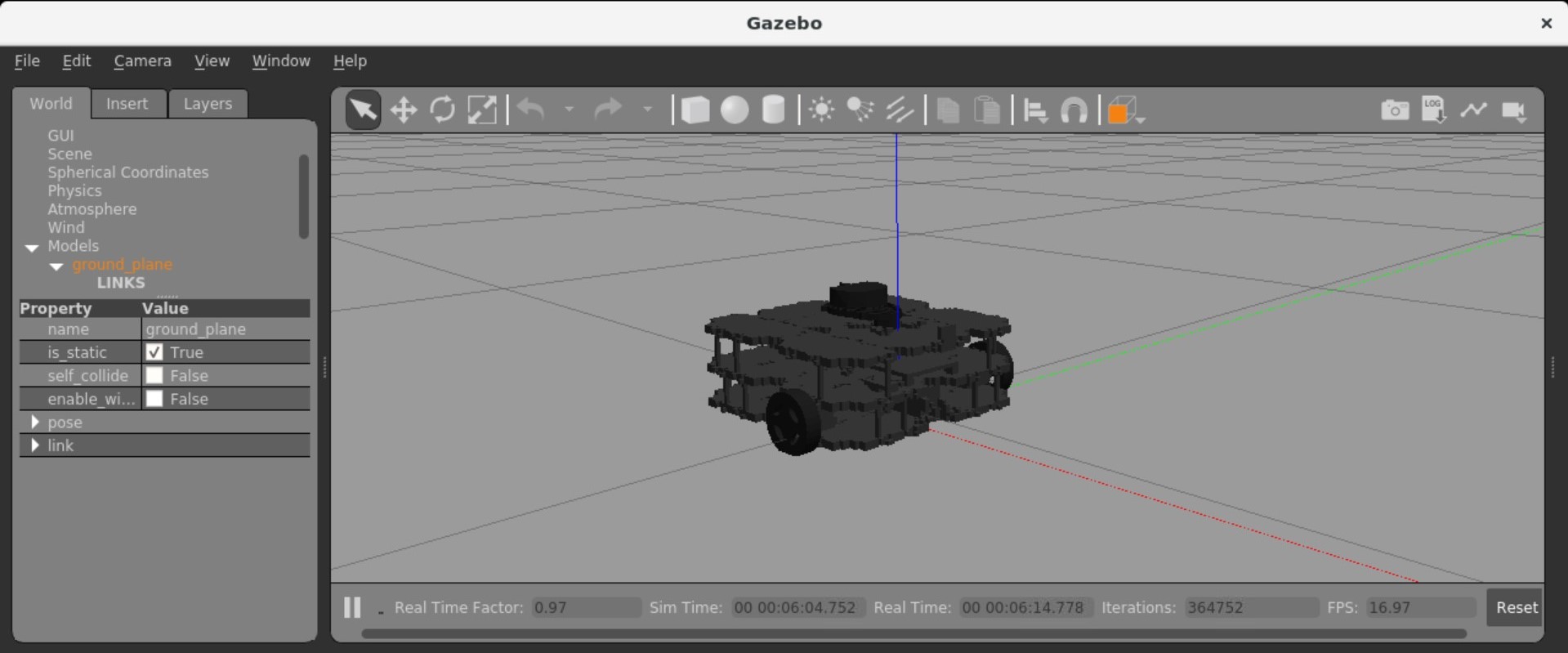
Clearpath enables robotics prototyping with one-click simulations using AWS
AWS helps Clearpath Robotics make it easier for their customers like Boston Dynamics to prototype robotics applications in simulation. With the AWS CloudFormation Launch Stack, Clearpath’s customers can launch Gazebo simulations in AWS RoboMaker with a click of a button.

How INESC TEC tests and deploys ROS applications with AWS RoboMaker
The Institute for Systems and Computer Engineering, Technology, and Science (INESC TEC) is a research and development institute headquartered at the University of Porto in Portugal. In this blog, we discuss how robotics researchers at INESC TEC automate testing and deployment of their Robot Operating System (ROS)-application in AWS RoboMaker simulation.

Introducing upload configurations for AWS RoboMaker Simulation
Introduction AWS RoboMaker now supports data upload configurations within simulation jobs. This capability allows developers to define the type of simulation data they want to upload, choose the upload behavior, and reliably upload the simulation data to their preferred Amazon S3 output location. This functionality makes it easier for developers to review or analyze application […]

Guide To AWS Robotics at re:Invent 2020
Join AWS Robotics experts and innovative robotics companies at re:Invent this year to learn how to advance and speed up efforts to build robotics applications.

AWS Robotics announces an open source Cloud Robotics Curriculum
Amazon Web Services (AWS) Robotics has released an introductory Cloud Robotics Curriculum designed to help students, educators, and entry level developers build robotics applications with Robot Operating System (ROS) and AWS RoboMaker.
Deploying ROS applications as Snaps with AWS IoT Greengrass 2.0
AWS recently announced the release of AWS IoT Greengrass 2.0, an edge runtime that offers added flexibility in deploying containerized applications than its predecessor. In this blog, we’ll explore why this improvement is useful for the robotics community, and walk through how you package and deploy Robot Operating System (ROS) applications to devices using AWS IoT Greengrass 2.0.